1.7.2. TS100自动循迹避障小车使用说明#
1.7.2.1. 一. 物料准备#
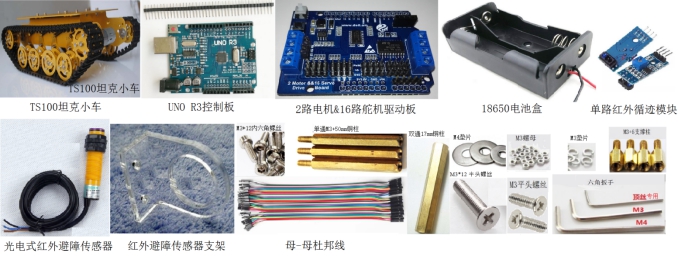
1.7.2.1.1. 材料清单#
名称 |
数量 |
名称 |
数量 |
|---|---|---|---|
Doit坦克小车 |
1 |
单通M3+50mm铜柱 |
2 |
UNO R3控制板 |
1 |
双通17mm铜柱 |
2 |
2路电机&16路舵机驱动板 |
1 |
M3平头螺丝 |
10 |
18650电池盒 |
1 |
M3*12内六角螺丝 |
2 |
单路红外循迹模块 |
2 |
M4垫片 |
4 |
光电式红外避障传感器 |
3 |
M3螺母 |
9 |
红外避障传感器支架 |
3 |
单通 3mm支撑柱 |
3 |
M3*12平头螺丝 |
1 |
M3垫片 |
2 |
母-母杜邦线 |
15 |
扳手 |
3(种) |
1.7.2.1.2. 实物图鉴#
1.7.2.2. 二.安装与接线#
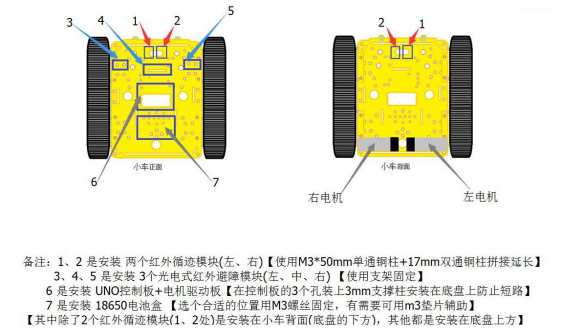
1.7.2.2.1. 硬件安装#
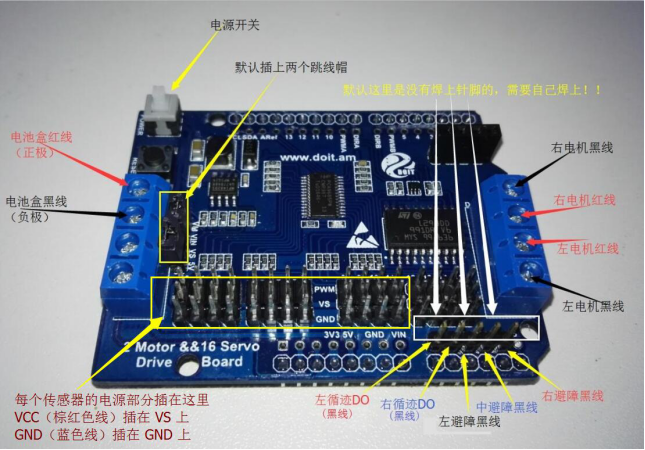
1.7.2.2.2. 电路接线#
默认驱动板是直插到UNO控制板上。之后按图示连接;
【图示说明】
电源部分:电池盒的红线(正极)接驱动板的VM;电池盒的黑线(负极)接驱动板的GND;
电机部分:将电机线插到电机的接线槽里,注意这里每个电机线只使用到红黑两根线,其他颜色的线不需要用到(可以缠起来);
左电机的红线 —–> 驱动板的A+ 左电机的黑线 —–> 驱动板的A-;
右电机的红线 —–> 驱动板的 B- 右电机的黑线 —–> 驱动板的 B+;
传感器部分:每个传感器都有3根线,分别为电源线(VCC、GND)和信号线;
信号线:
左红外循迹模块 (安装在1处) 的信号线DO (黑线) —–> 驱动板的1
右红外循迹模块 (安装在2处) 的信号线DO (黑线) —–> 驱动板的2
左红外避障模块 (安装在3处) 的信号线DO (黑线) —–> 驱动板的3
中红外避障模块 (安装在4处) 的信号线DO (黑线) —–> 驱动板的4
右红外避障模块 (安装在5处) 的信号线DO (黑线) —–> 驱动板的5
电源线:
每个传感器的电源线部分,VCC(棕红色线) 插在VS 上,GND(蓝色线)插在 GND上;
1.7.2.3. 三.功能与使用#
1.7.2.3.1. 功能说明#
本小车为自动循迹小车,循迹传感器安装在车子底盘的底方,一上电小车即进入自动循迹,在白色地板上沿着指定的(黑色)路线运动,若是在车子底方的地板上探测不到黑色轨迹,这小车默认后退,直到探测到黑色轨迹为止;鉴于本车子底方两个循迹模块的横向距离大约为2.5cm,建议在地板上设置黑色轨迹的时候,所设置的轨迹宽度在3cm~3.5cm为宜,对于轨迹的要求是尽量平整不反光,拐弯之处尽可能圆滑而不是接近90度的小拐角,否则车子会走得太过别扭;黑色轨迹可以用黑色电工胶布贴在白色地板上。小车底盘的上方安装3路光电式红外避障传感器,相比普通红外避障传感器,这种光电式传感器的特点是探测距离远、探测灵敏度高。小车的控制逻辑是默认状态下是处于自动不断循迹状态,当车子只要至少有1个红外避障传感器探测到前方有障碍物,小车立即停止循迹并静止在原地,直到前方的障碍物消失小车才会继续启动进入循迹状态。
1.7.2.3.2. 操作说明#
将小车和控制板、驱动板、传感器按要求安装好之后,按下驱动板的电源开关,小车即进入循迹模式。
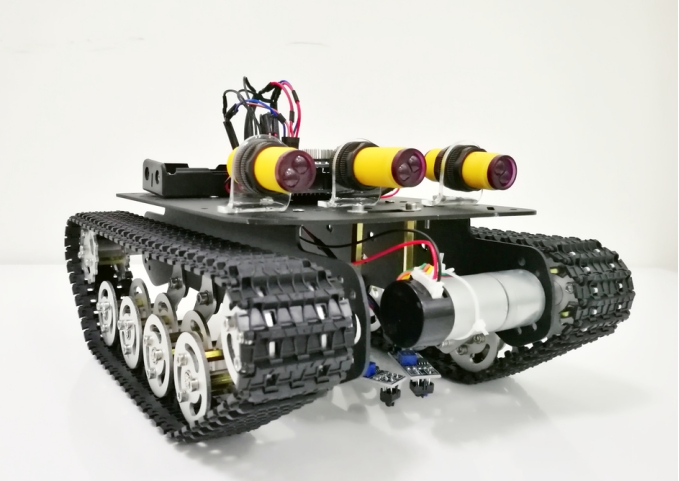
1.7.2.3.3. 小车多角度视图#
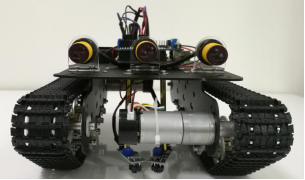
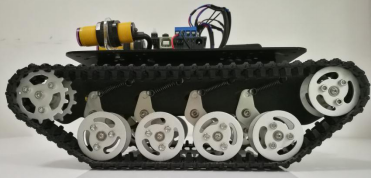
正视图 左视图
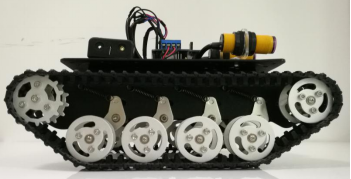
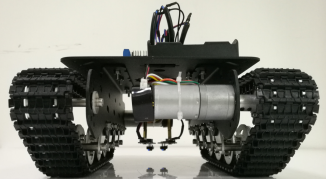
右视图 后视图
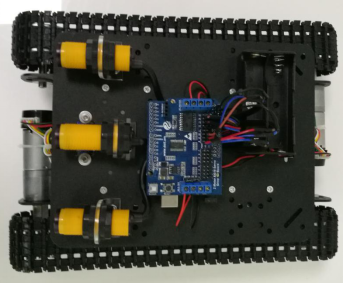
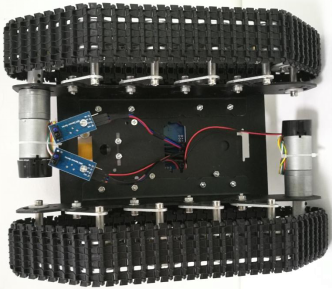
俯视图 底视图
1.7.2.4. 更多资源,请关注公众号!#
