

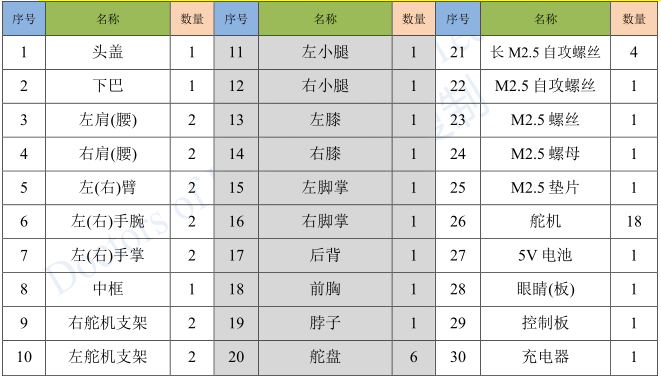
说明: (注:该清单及说明所注名称是仅适合材料外形清单,安装过程中名称以后文结构部件图注释为准)
2.2.8.1. 二、主控板介绍#
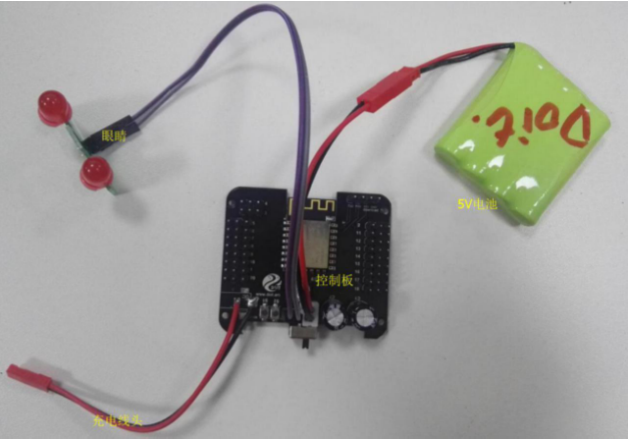
主控板整套
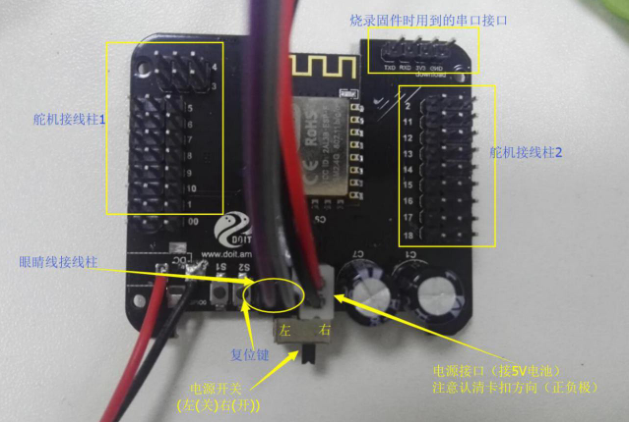
主控板特写
2.2.8.2. 三、结构介绍#
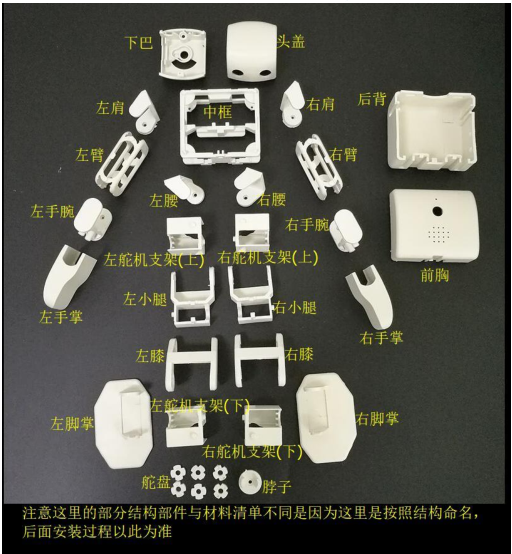
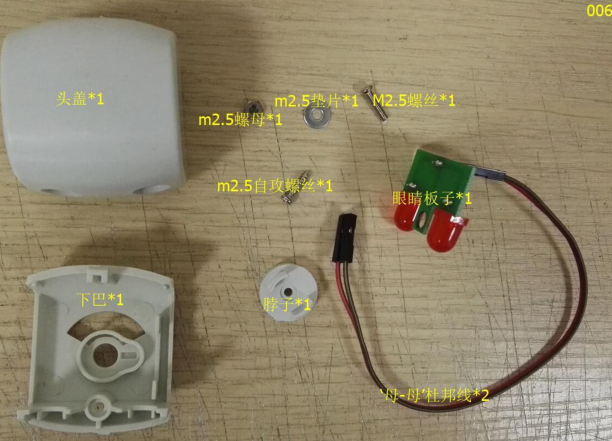
散装结构图
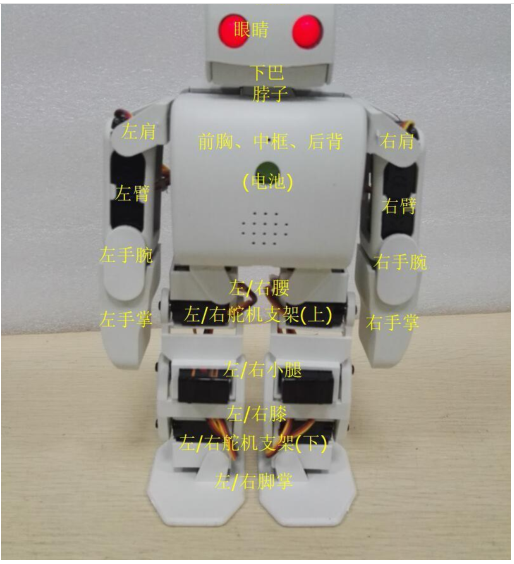
正面结构图
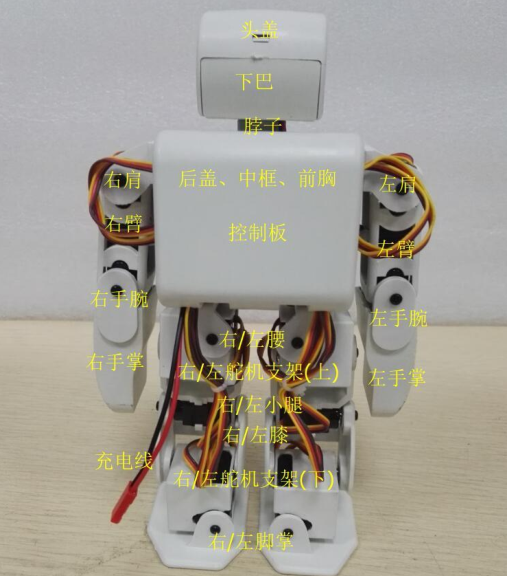
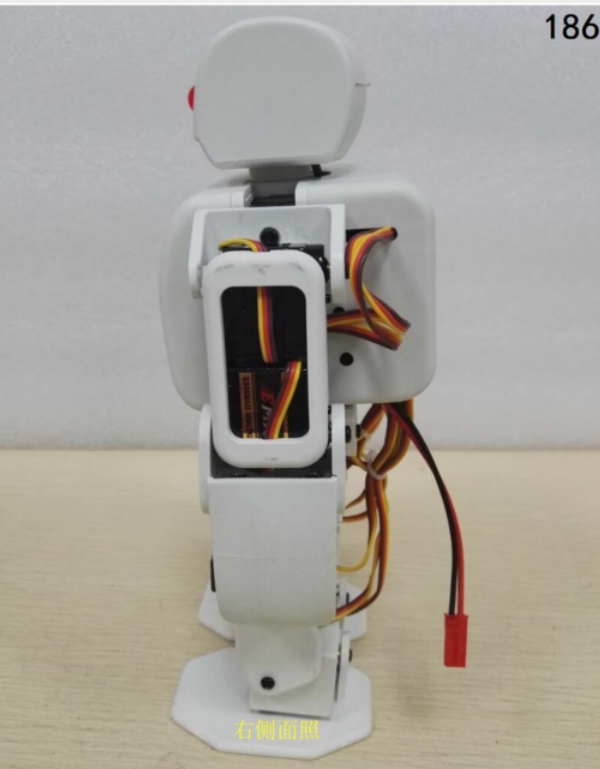
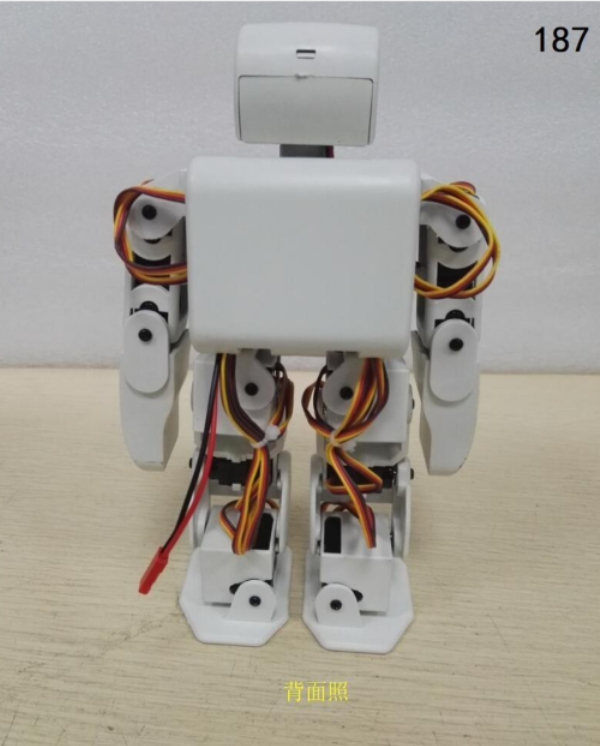
背面结构图
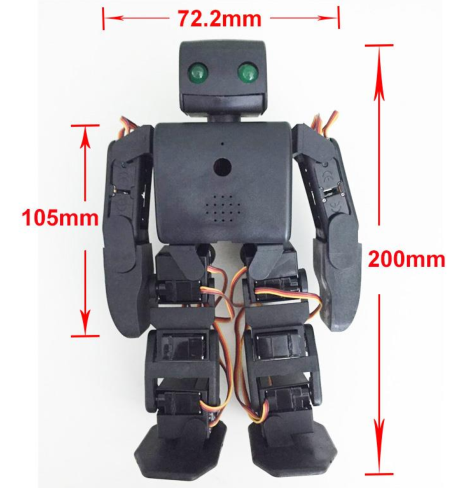
实物尺寸图
2.2.8.3. 四、组装与调试#
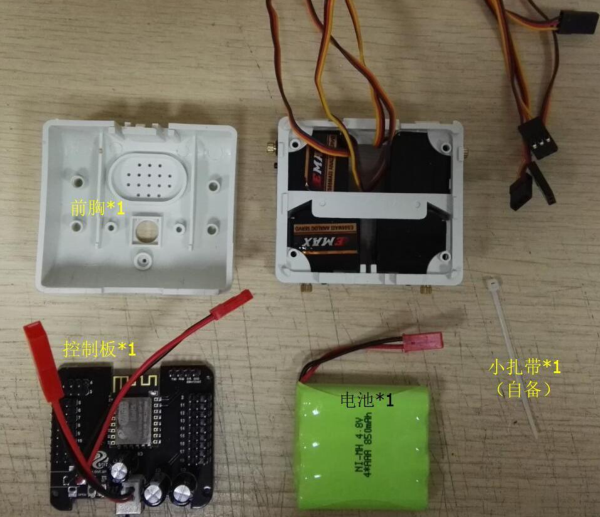
2.2.8.3.1. 1. 物料准备#
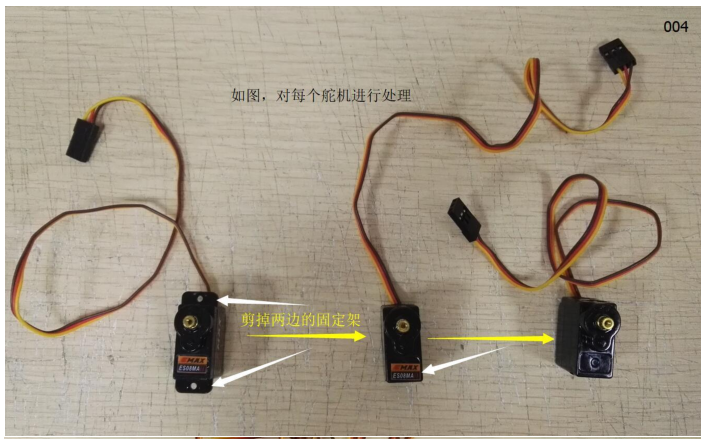
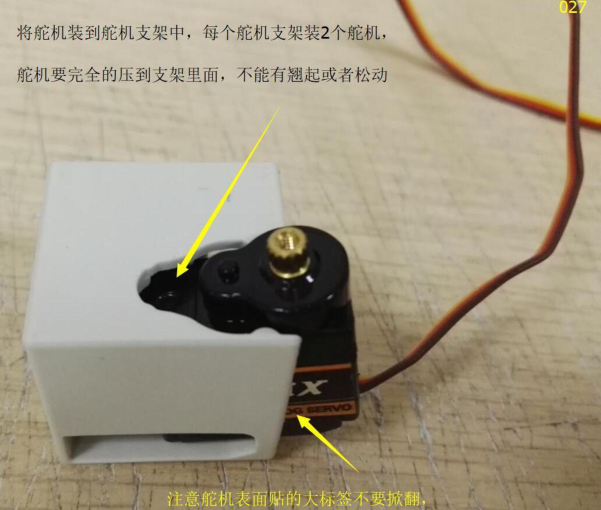
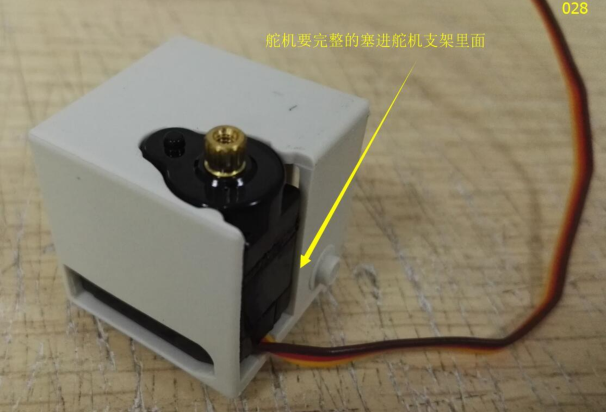
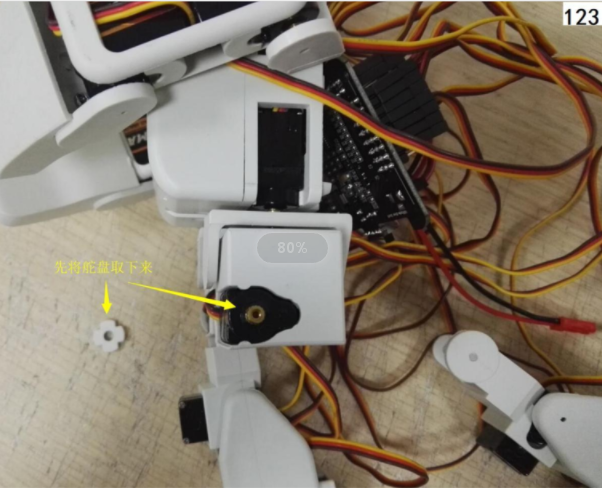
a. 舵机处理



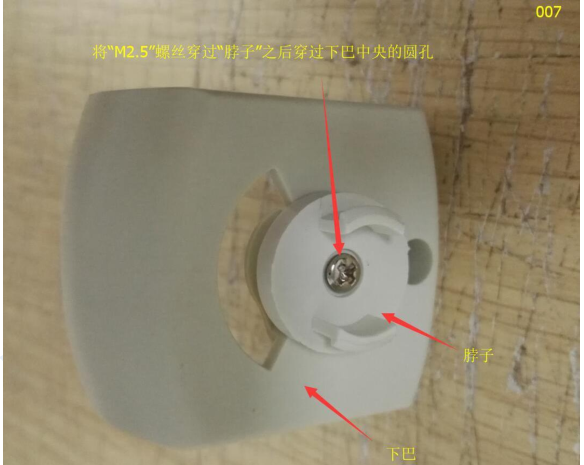
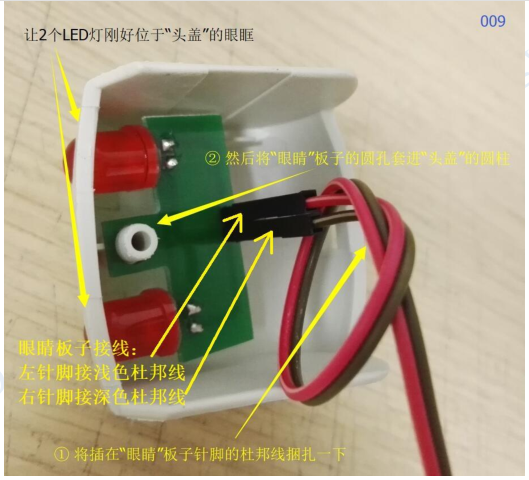
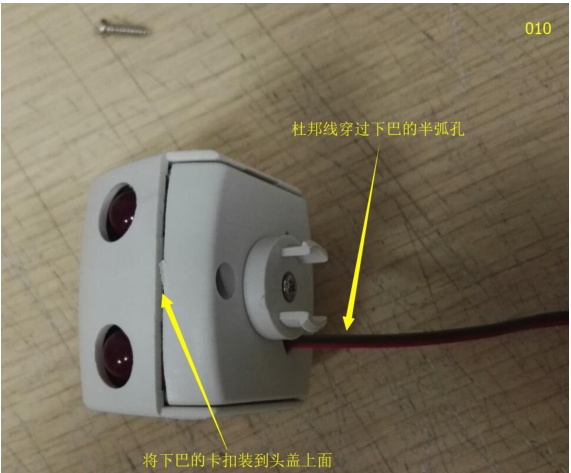
b. 头部处理



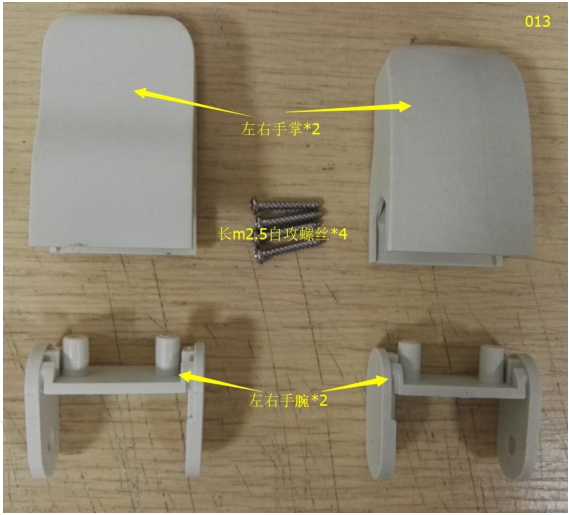
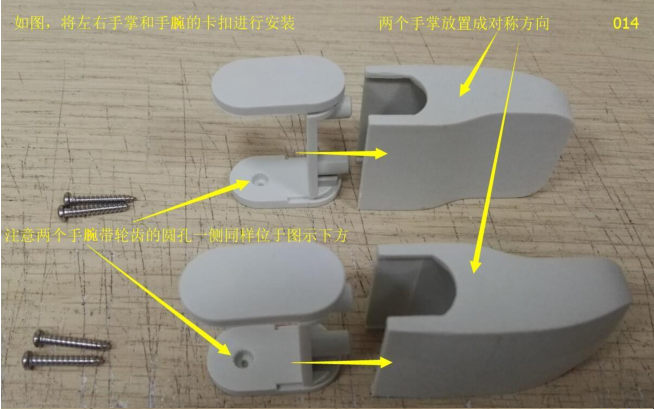
c.手掌处理


d .APP 安装 安卓版: 下载链接 1:http://www.doit.am/ViVi_1.1.0.apk 下载链接 2:https://www.pgyer.com/qIYq iOS 版: 下载链接:https://itunes.apple.com/us/app/vivi-robot/id1255421040?l=zh&ls=1&mt=81. Install 或者在苹果应用商店中搜索“ViViRobot”,然后下载安装; 以下文档使用安卓版 APP 作为介绍;

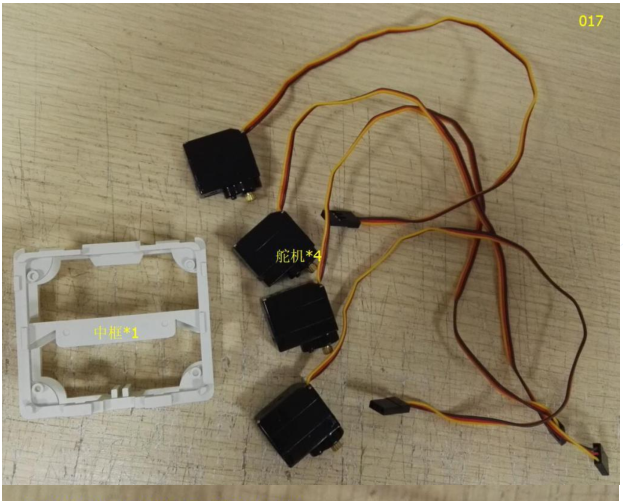
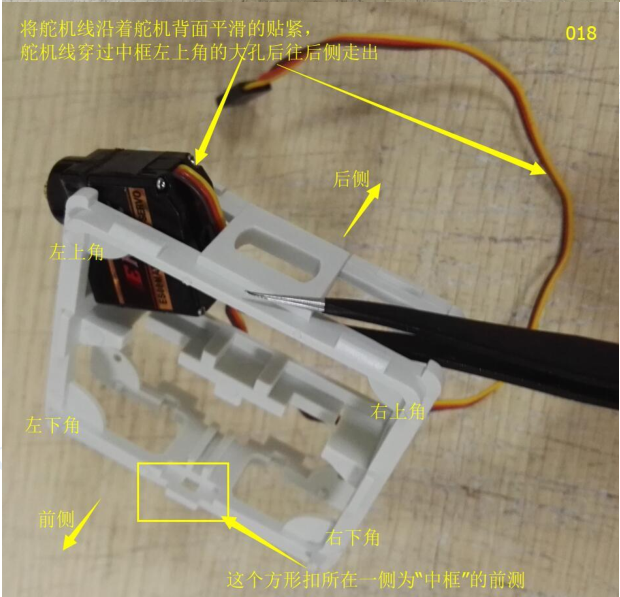
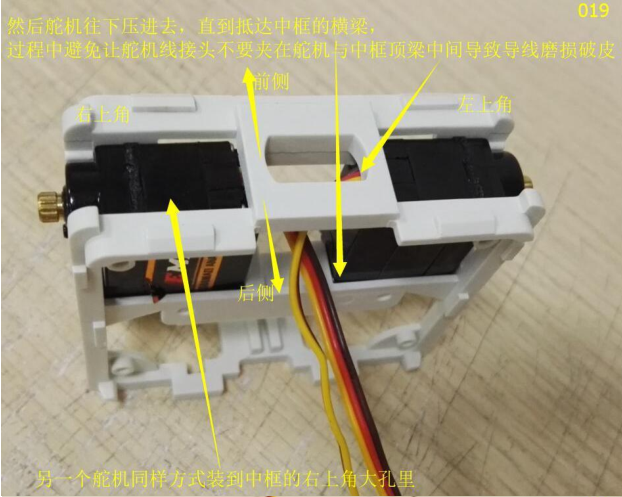
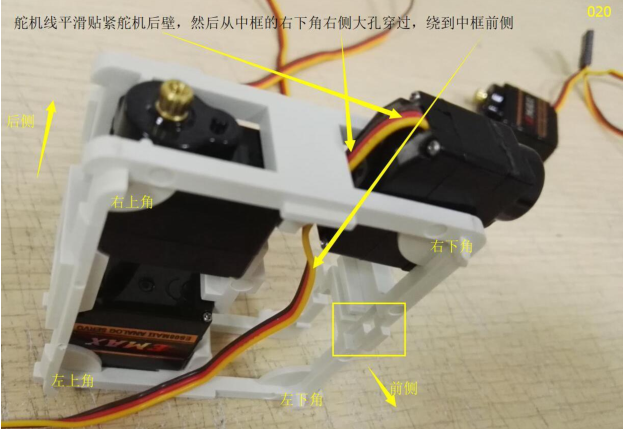
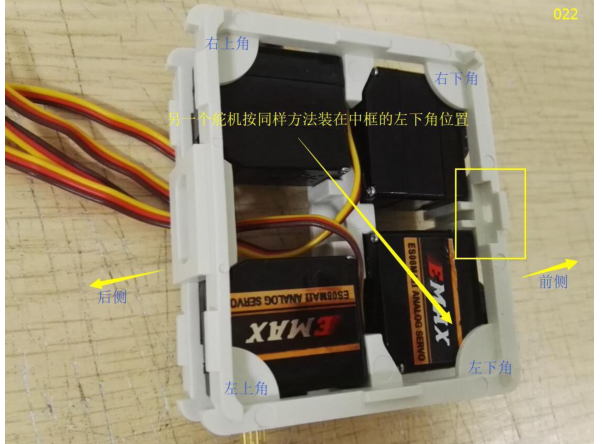
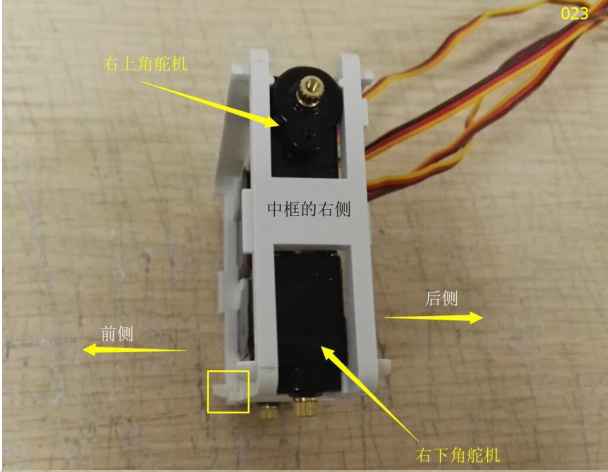
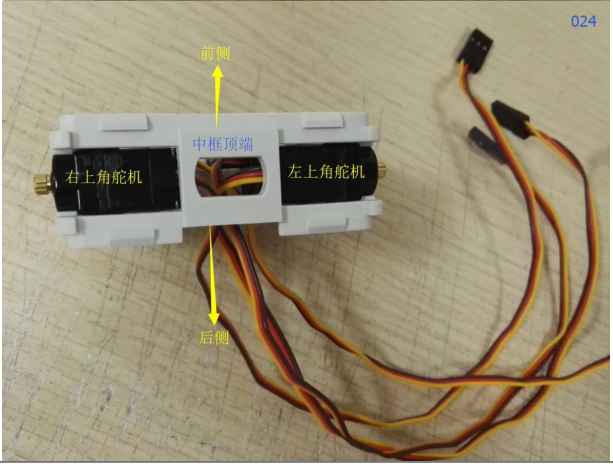
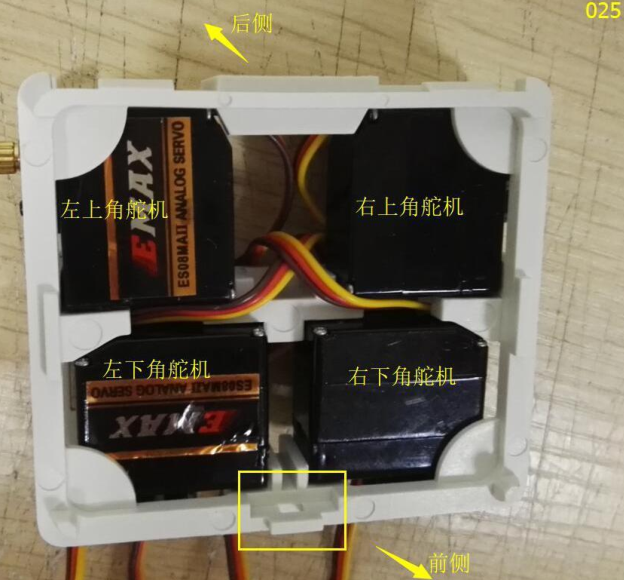
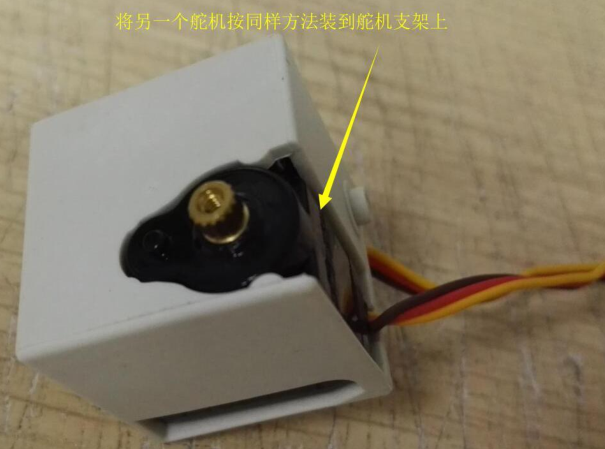
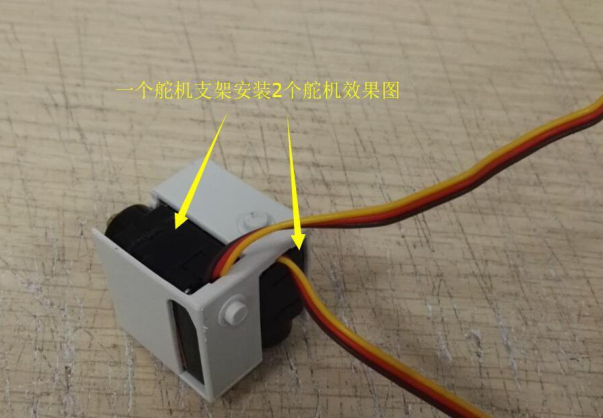
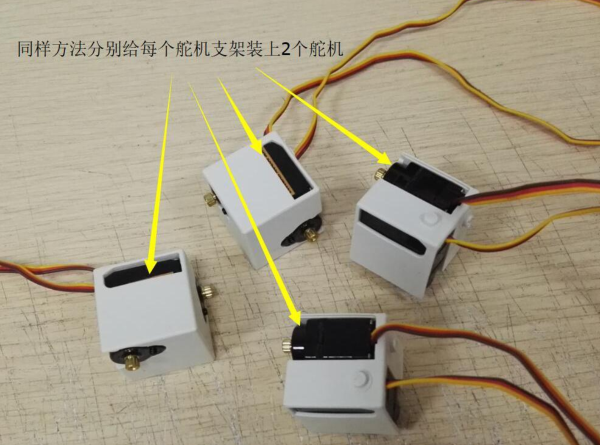
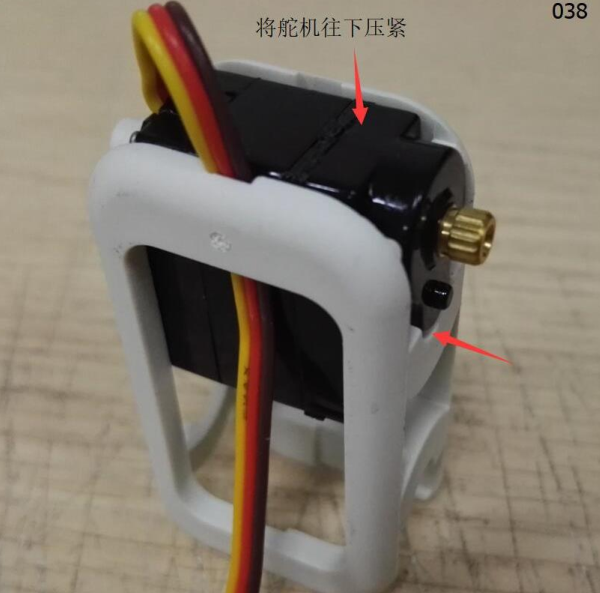
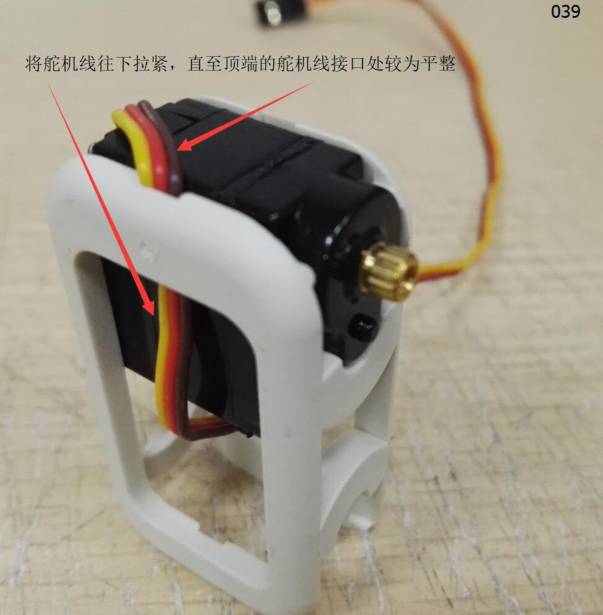
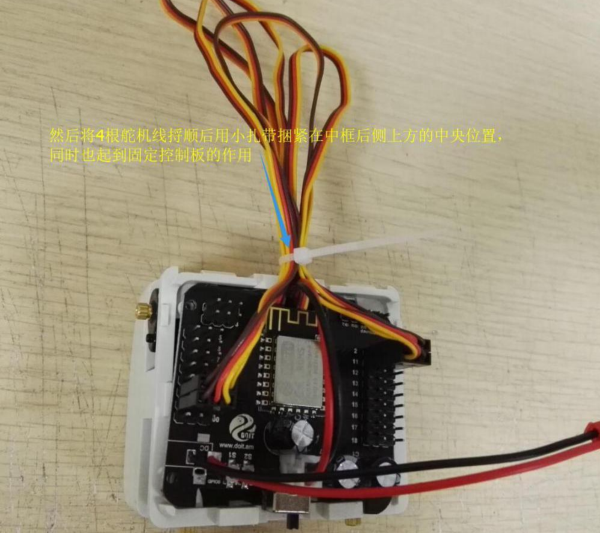
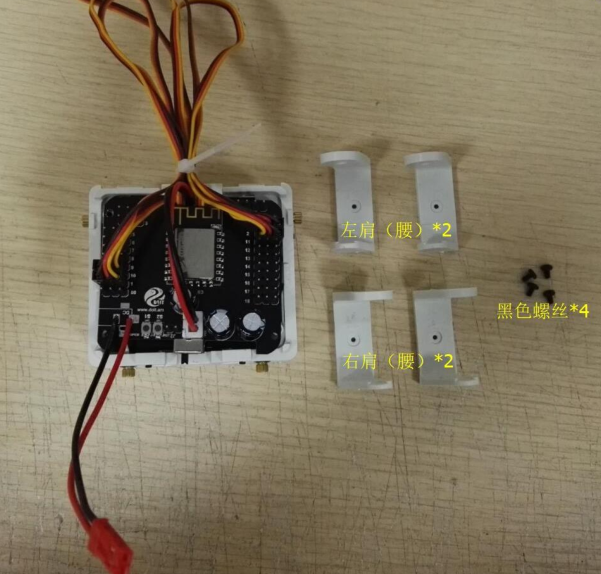
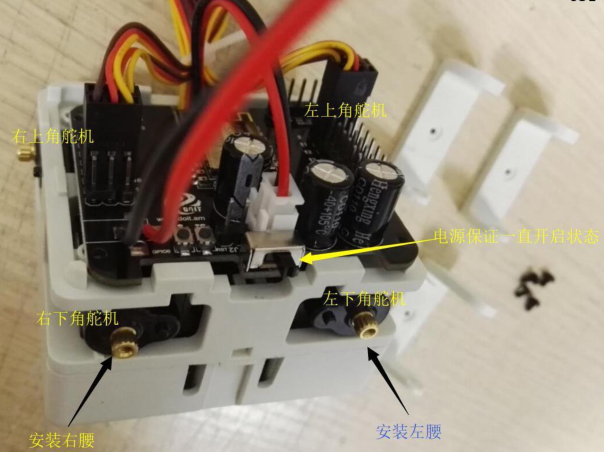
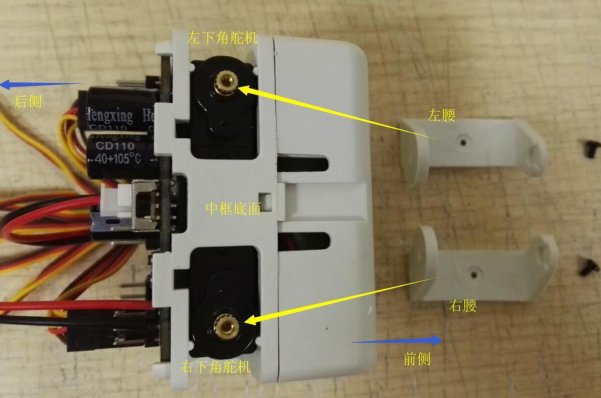
2.2.8.3.2. 2.安装舵机#
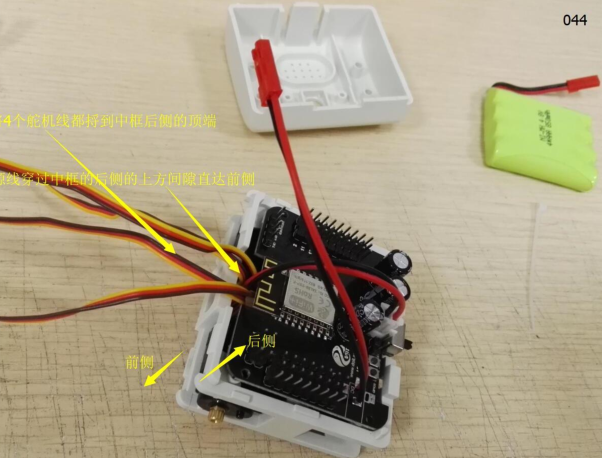
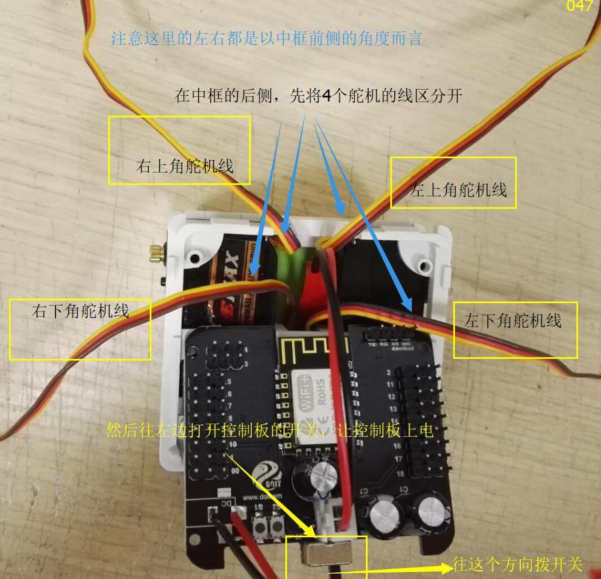
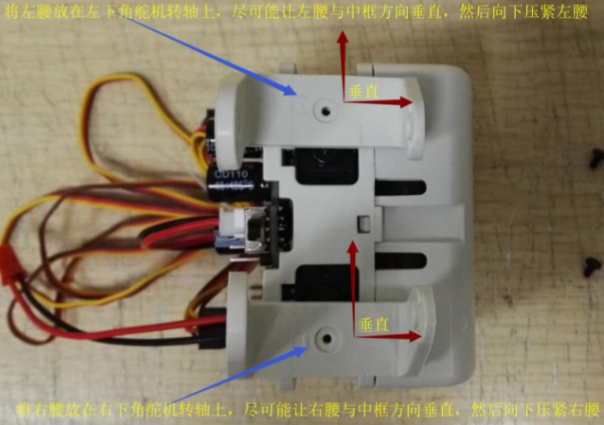
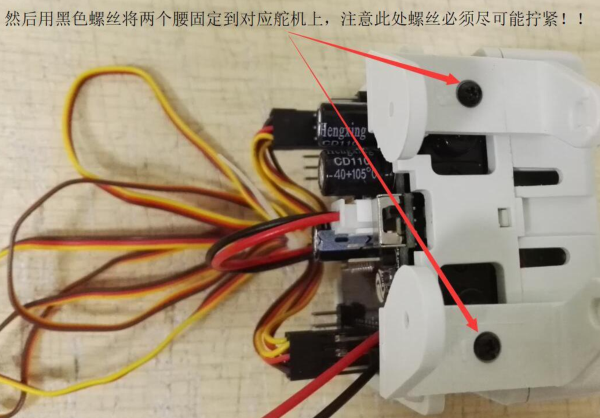
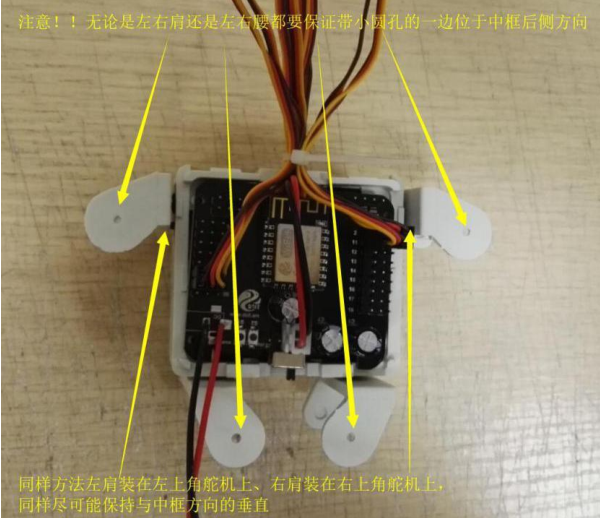
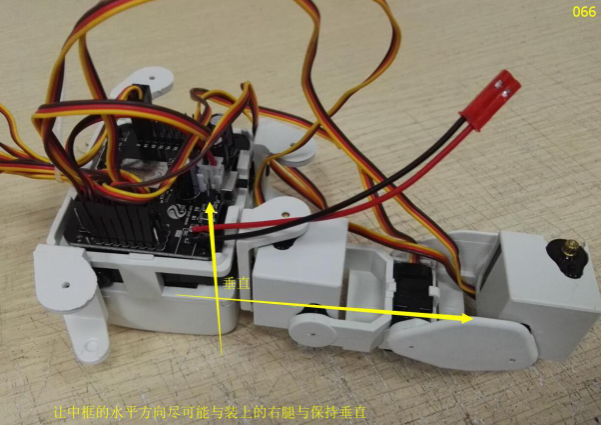
a. 中框

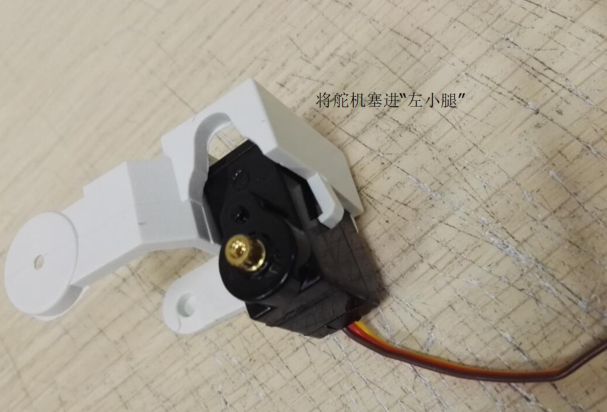
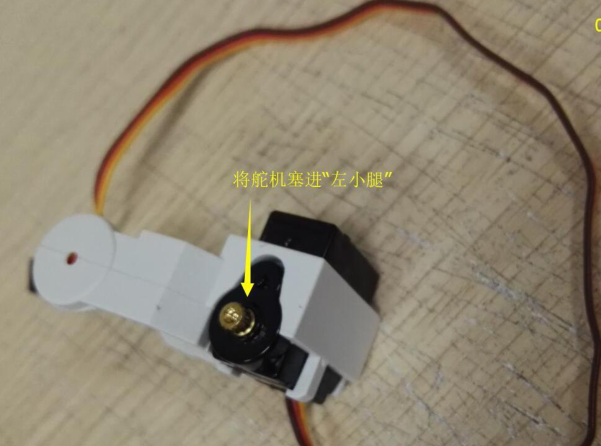
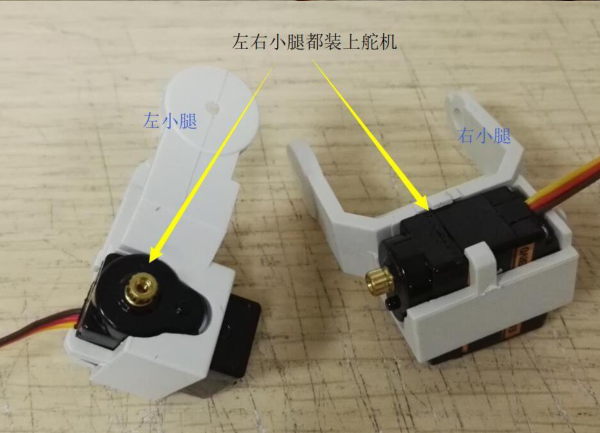
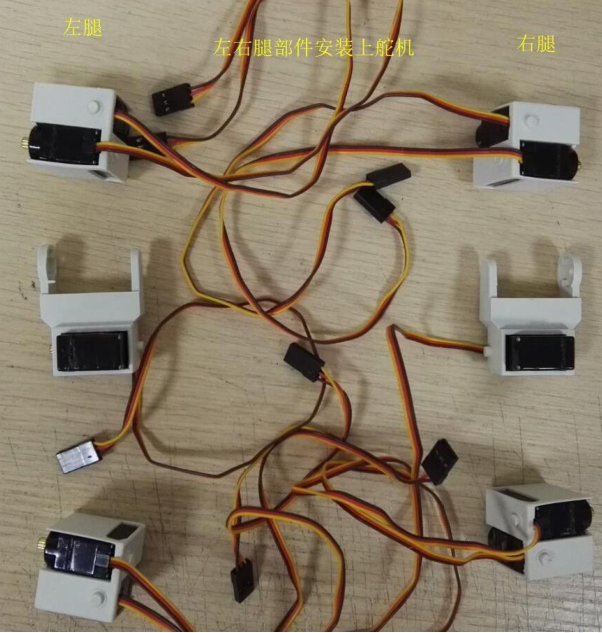
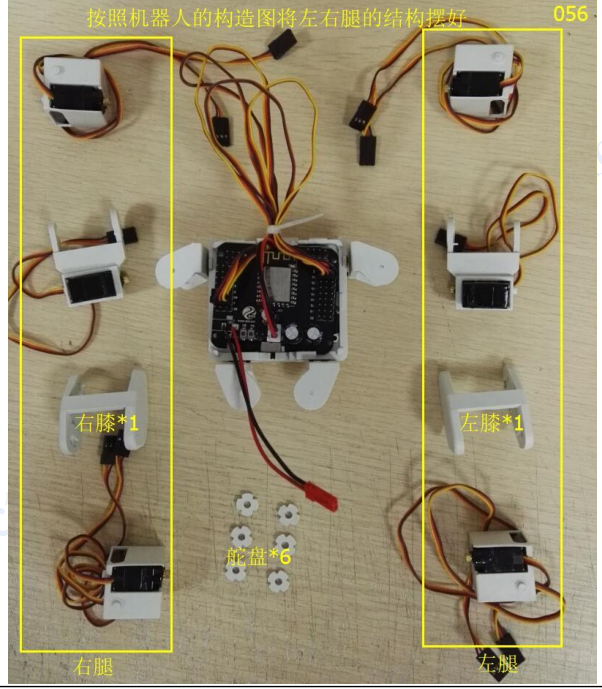
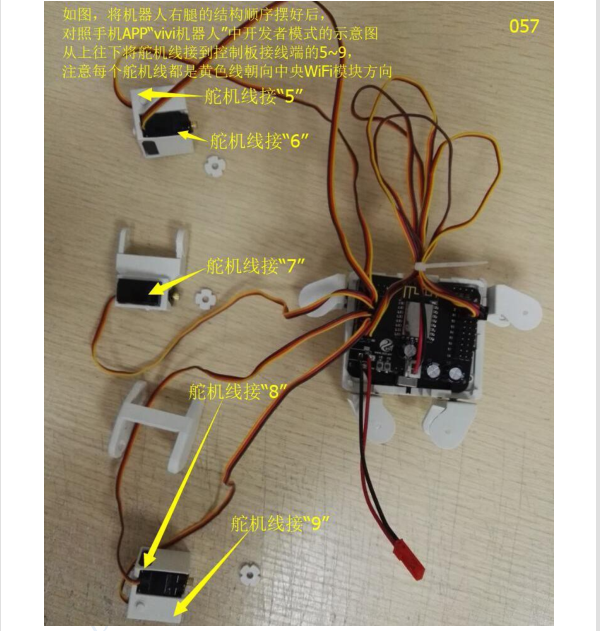
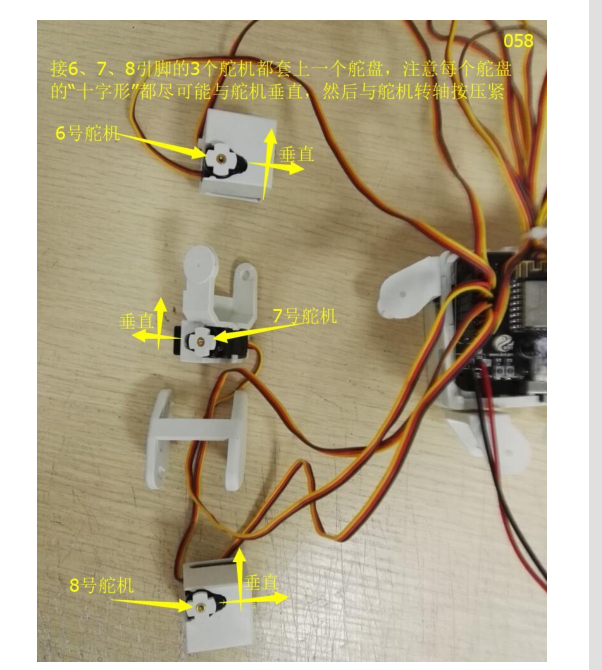
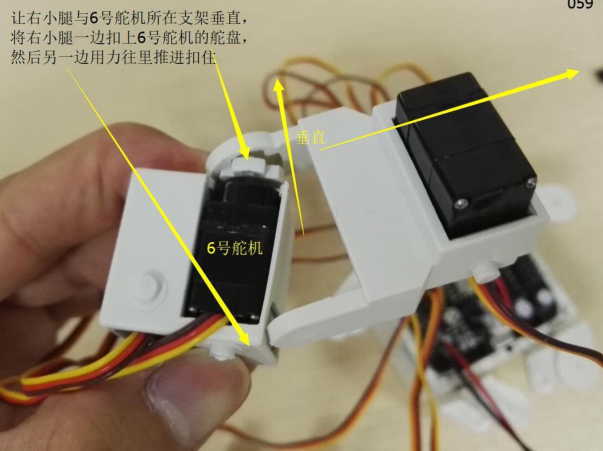
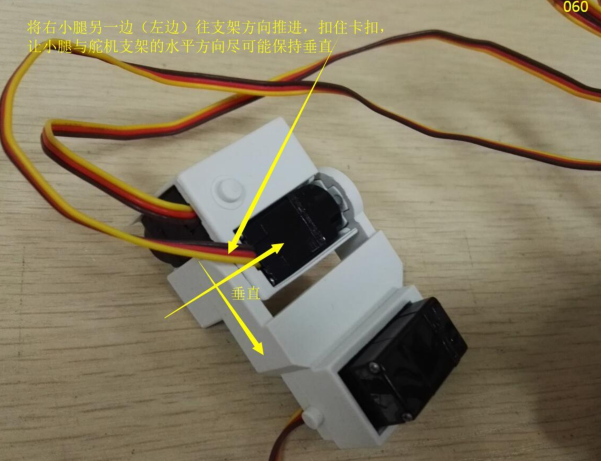
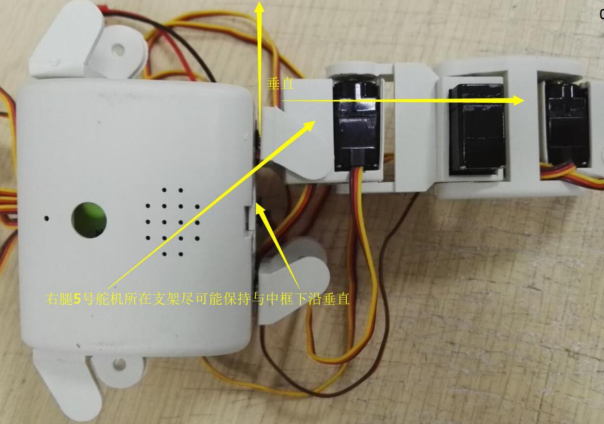
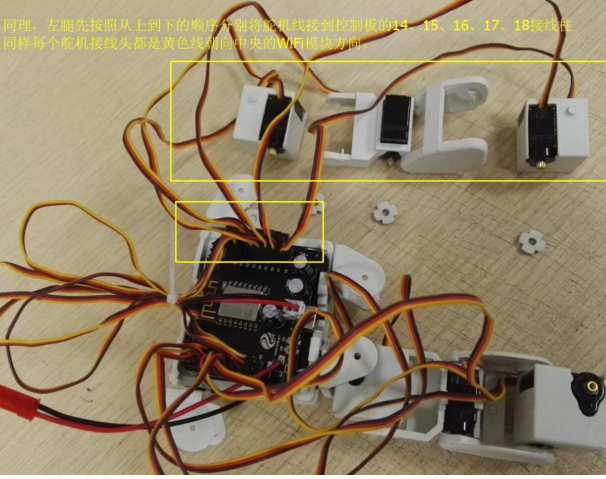
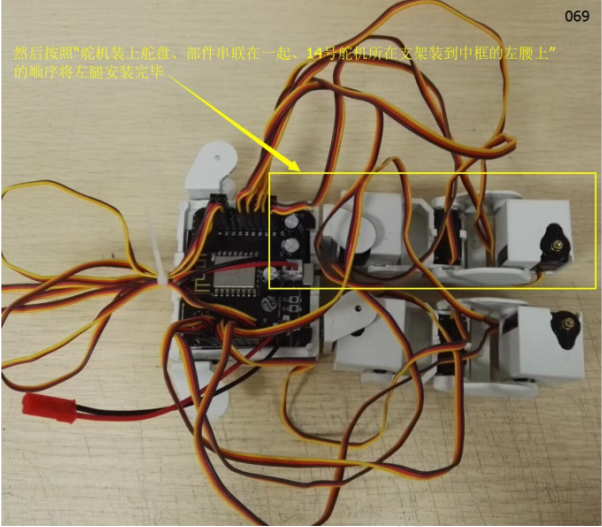
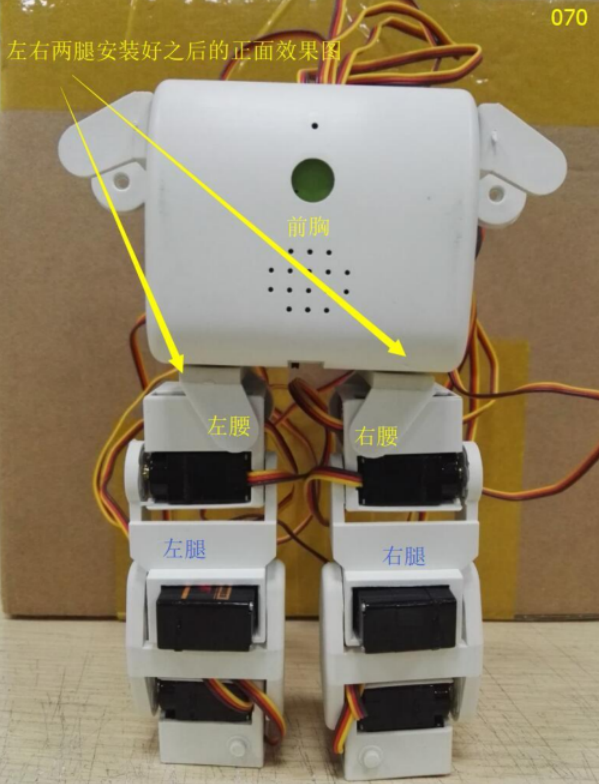
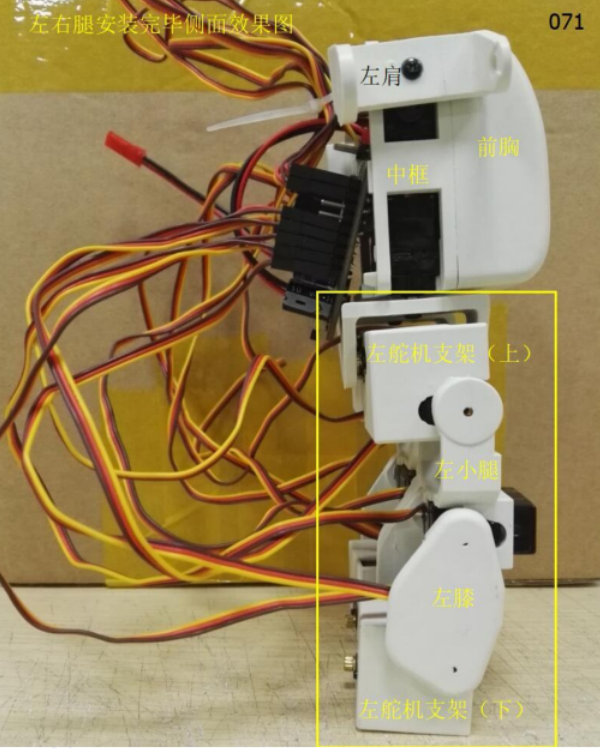
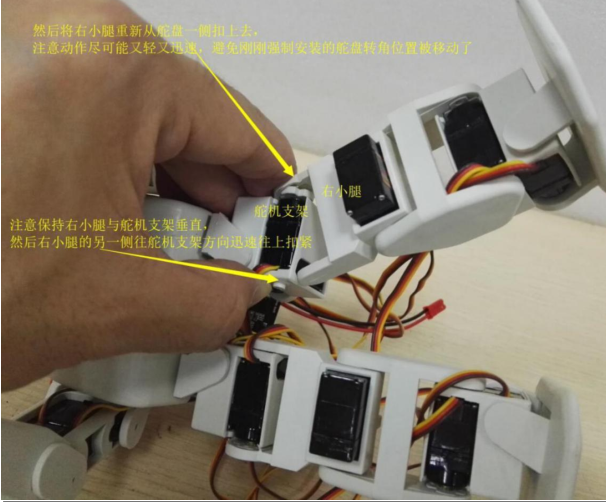
b .双腿

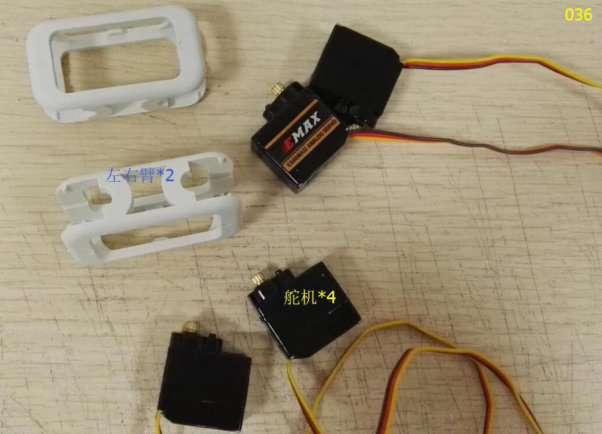
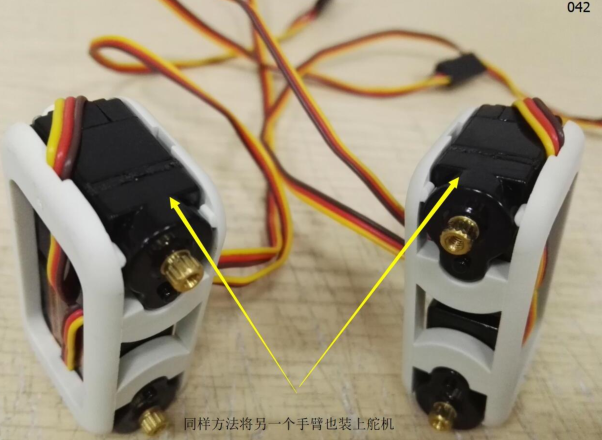
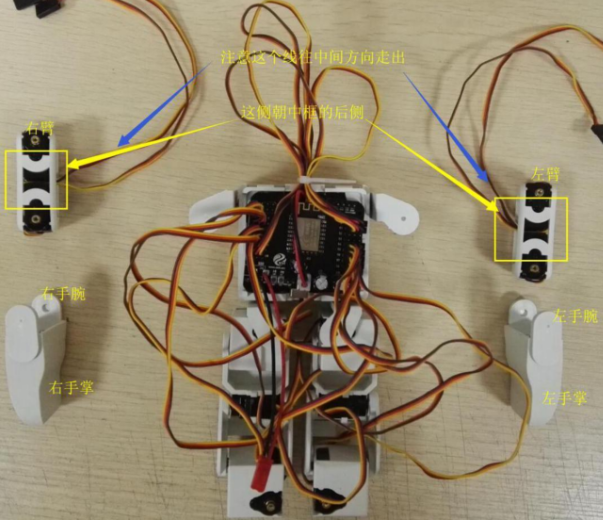
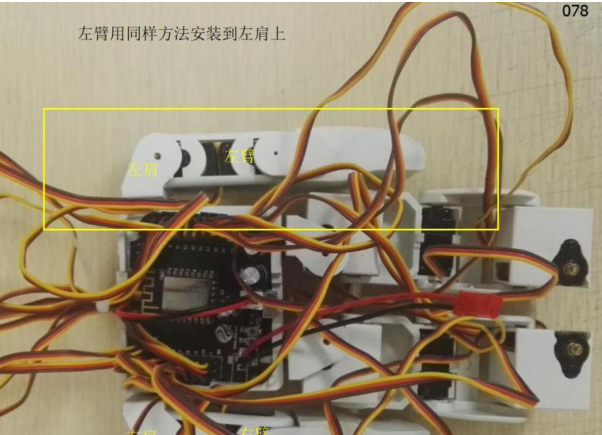
C. 双臂



2.2.8.3.3. 3. 关节组装#
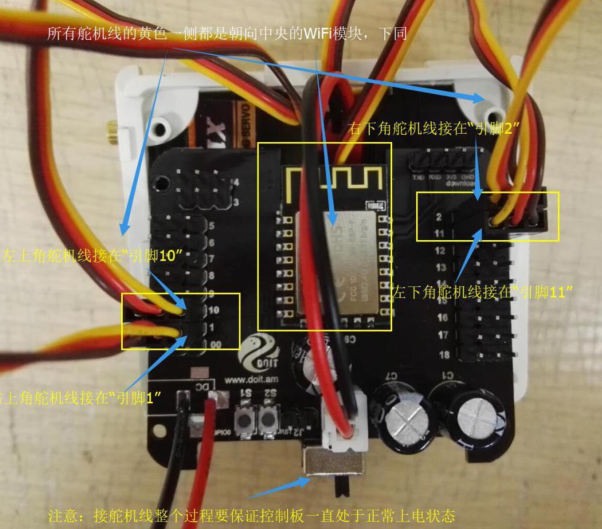
a. 主控板上电
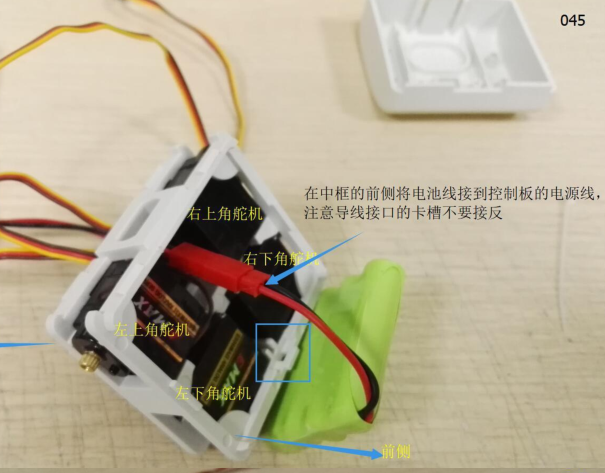

b. 躯干上电
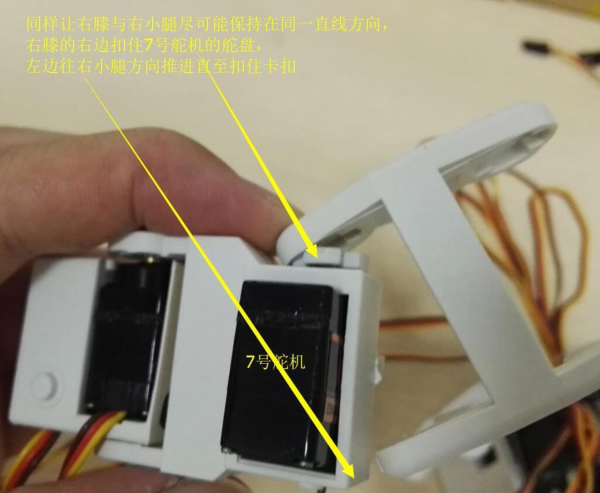
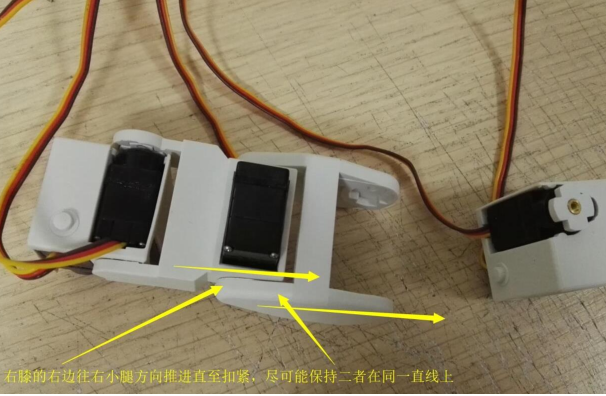
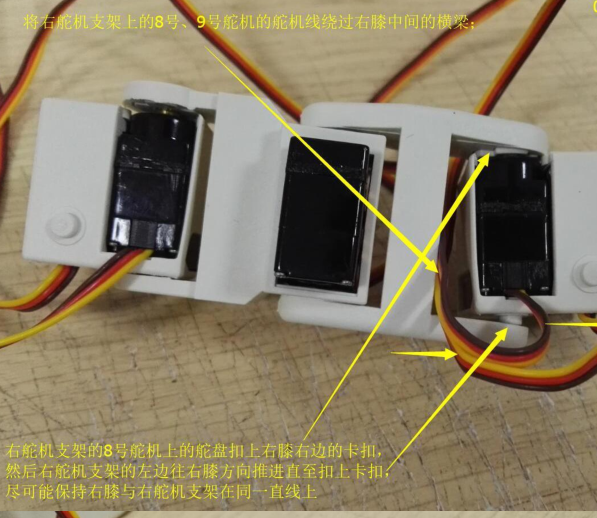
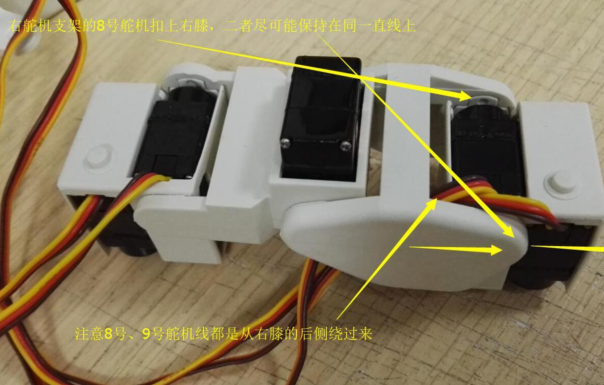
c. 双腿关节上电

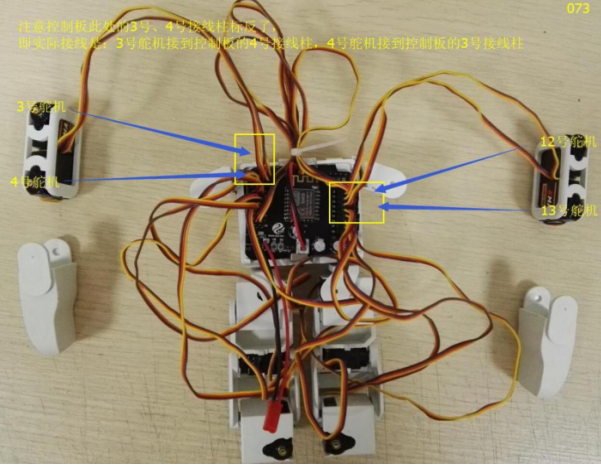
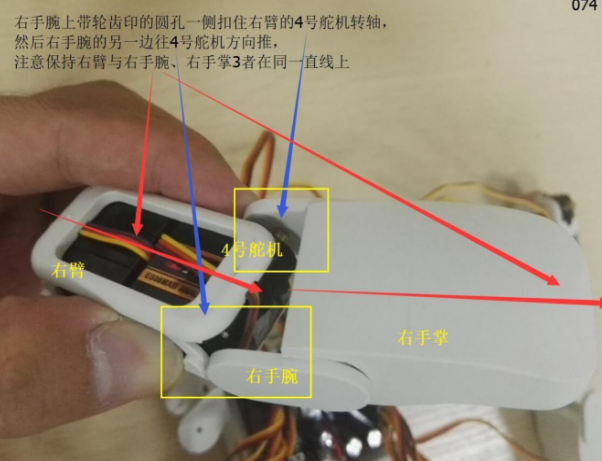
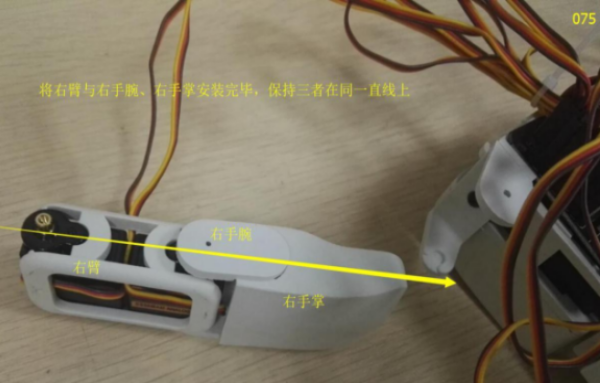
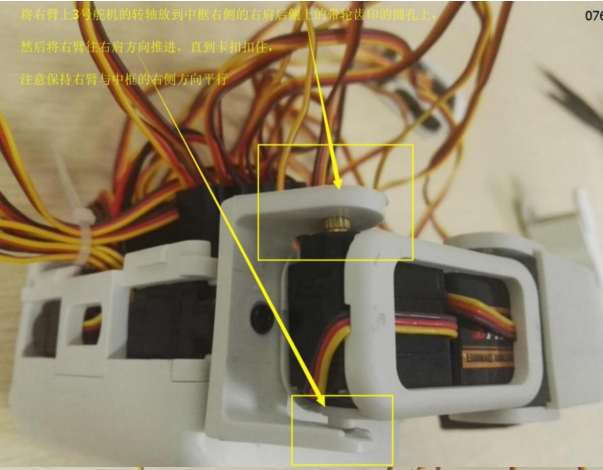
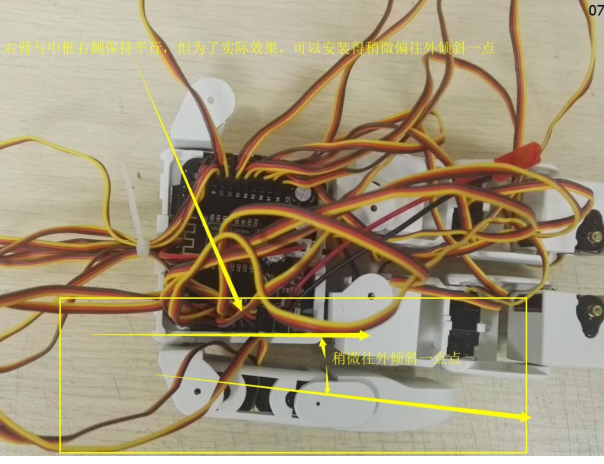
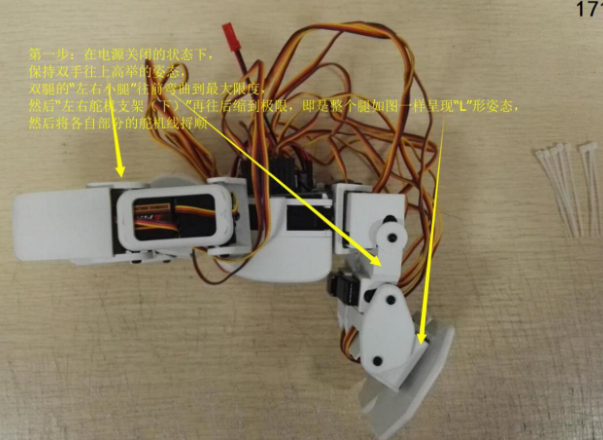
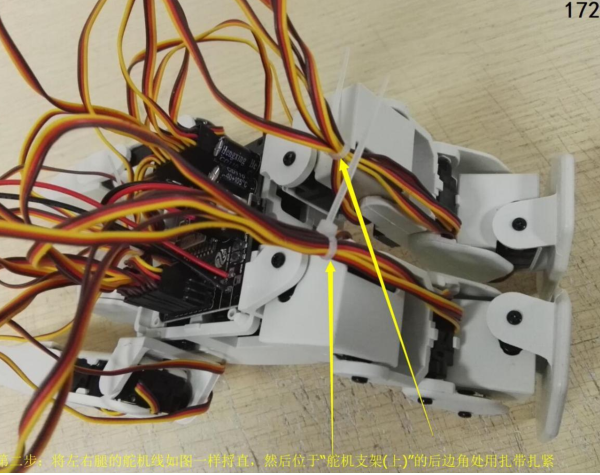
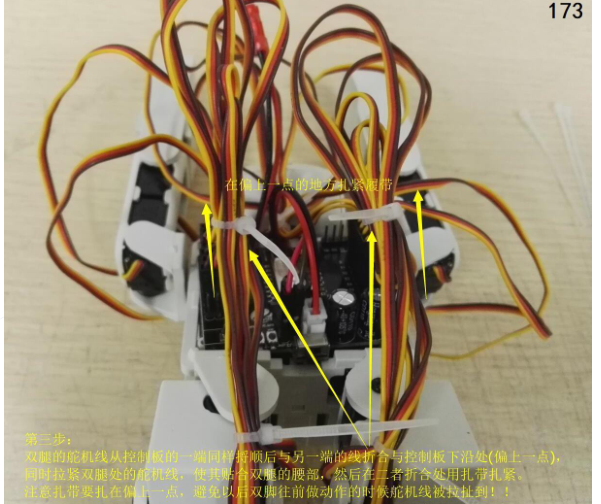
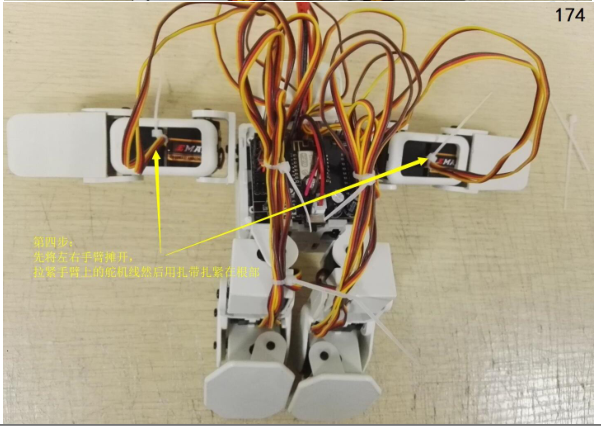
d. 胳膊关节上电

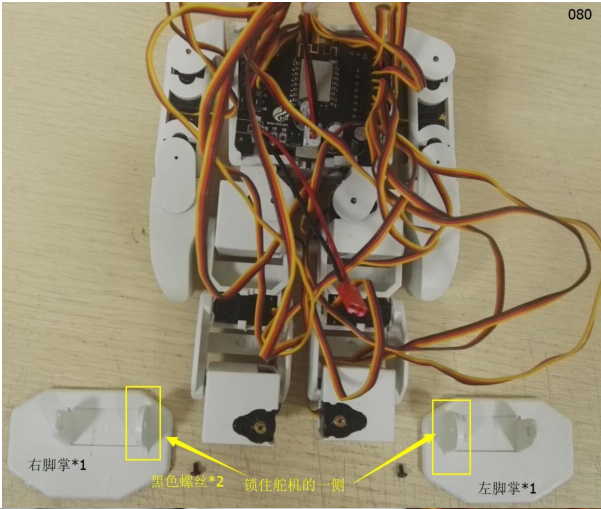
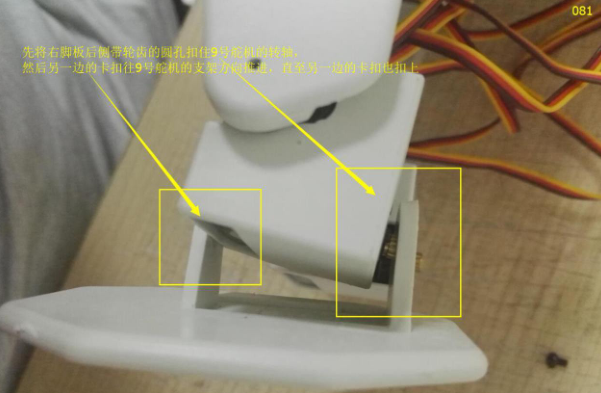
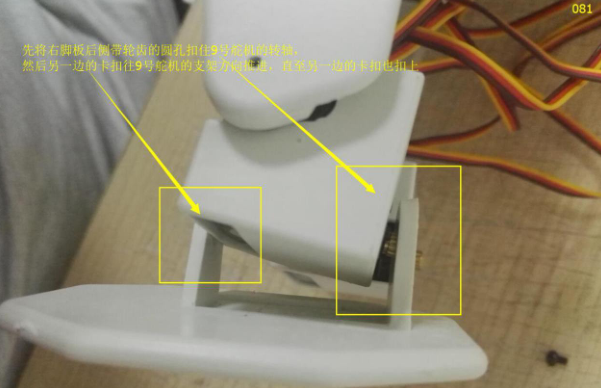
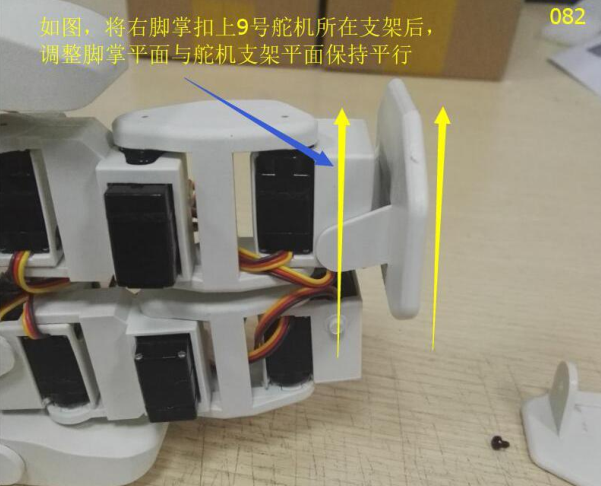
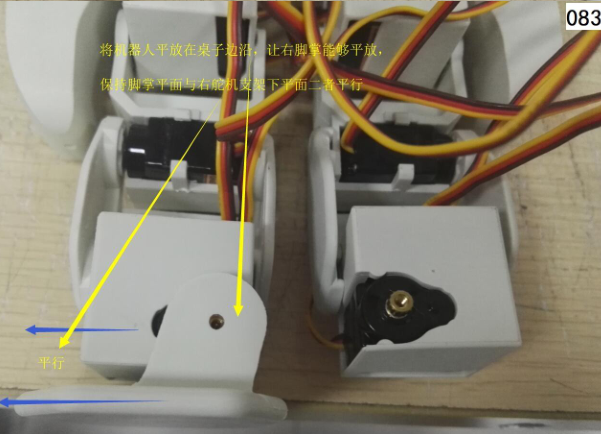
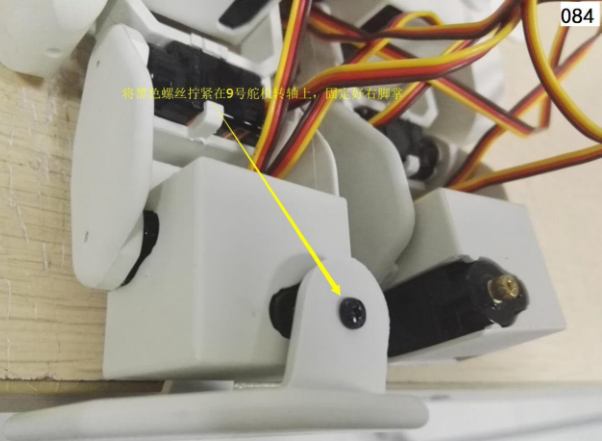
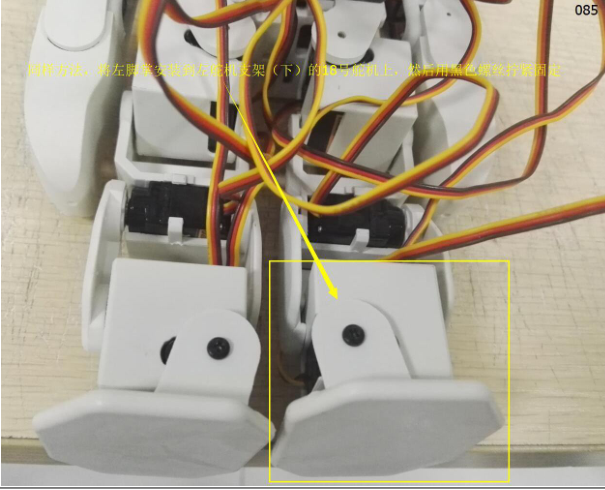
e. 脚板和手柄安装

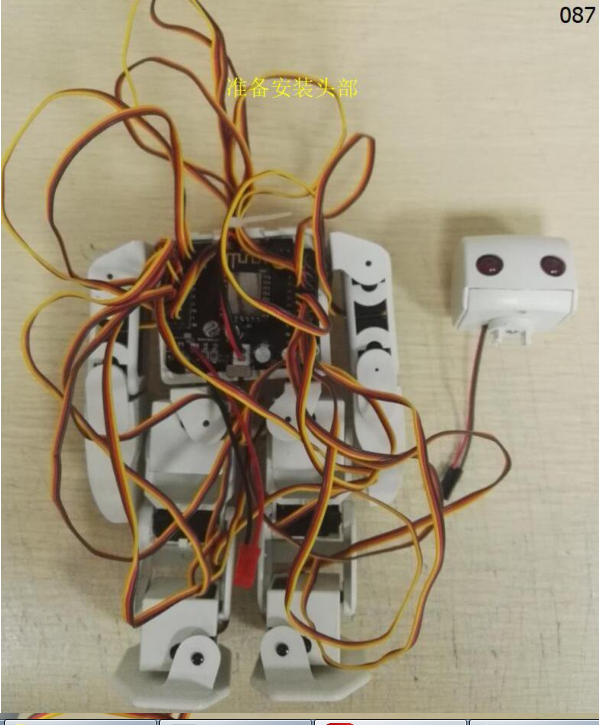
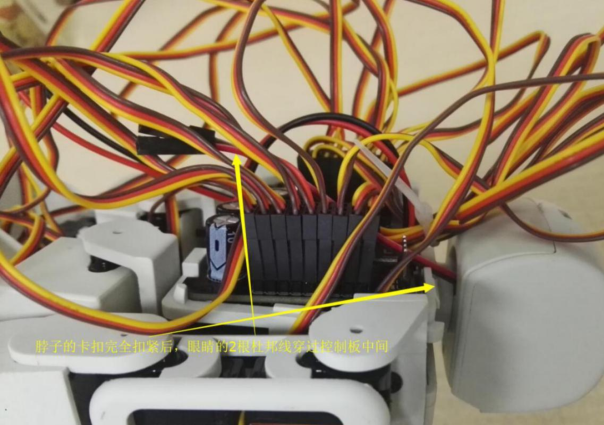
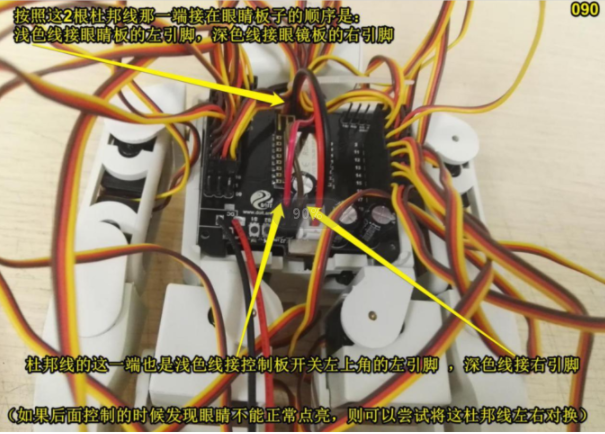
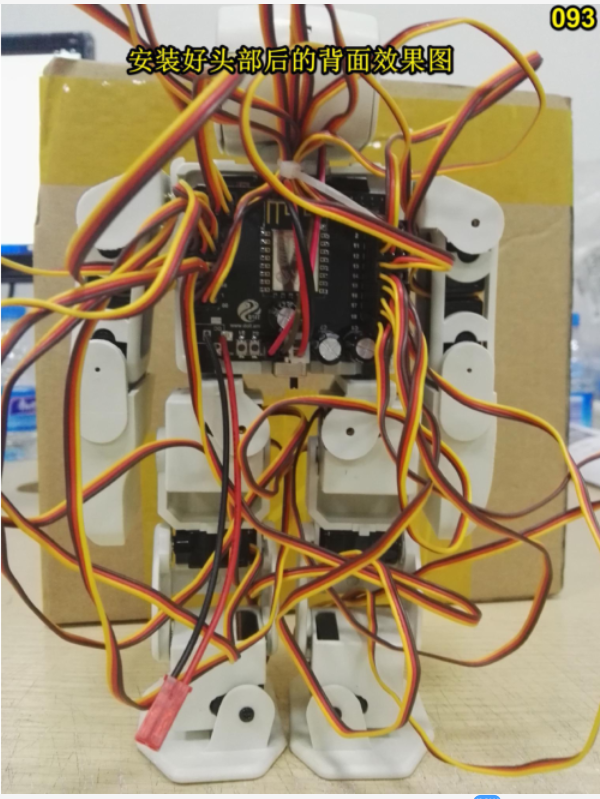
f. 头部安装



g .APP 调试 A:整个机器人的调试大致可以分为 2 个步骤:
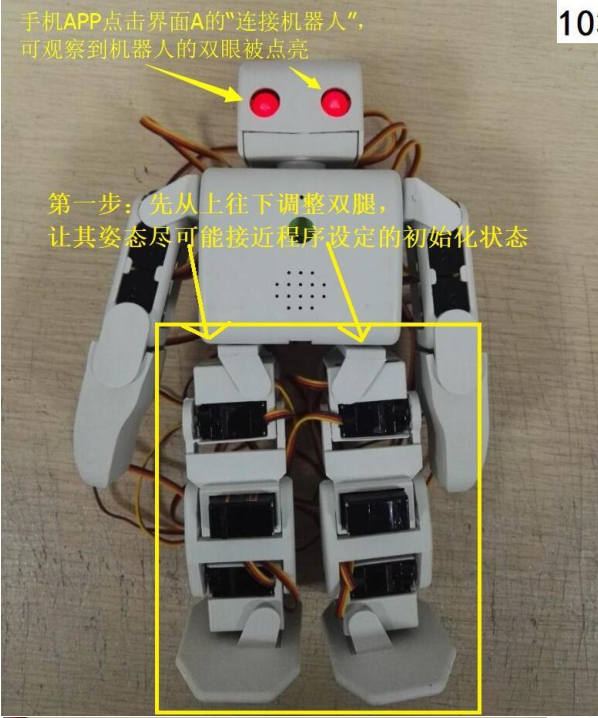
粗调:这步在上面安装过程中已经完成,关键点就是从步骤“主控板上电”开始机器人必须 保持上电状态直到步骤“头部安装”完成为止,目的是使得这个舵机是在机器人回到程序设 定的初始位置的状态下安装上去的,即是机器人安装时便是程序设定的初始化状态;
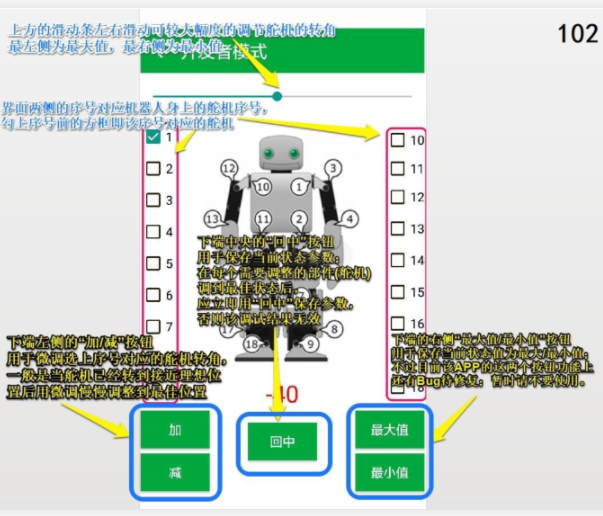
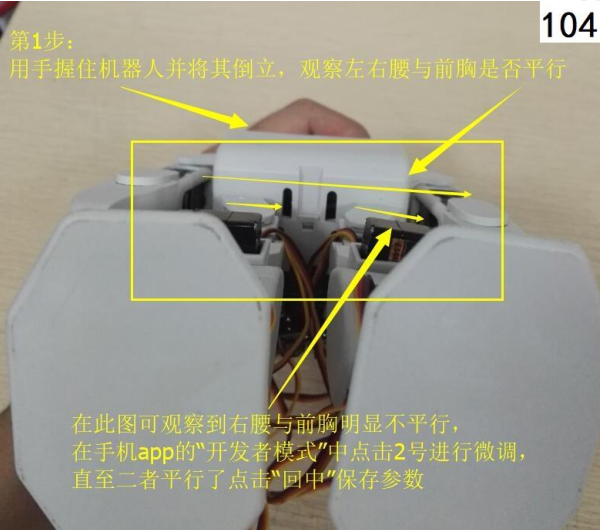
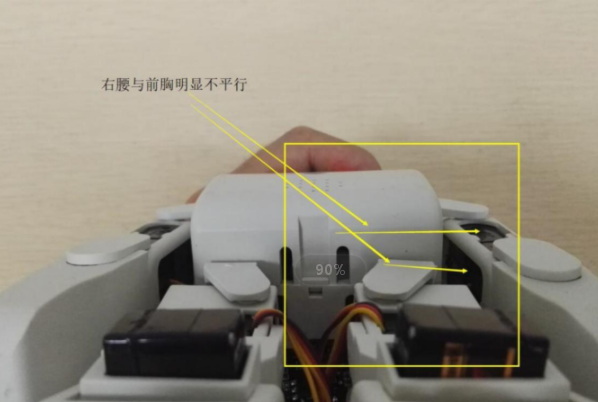
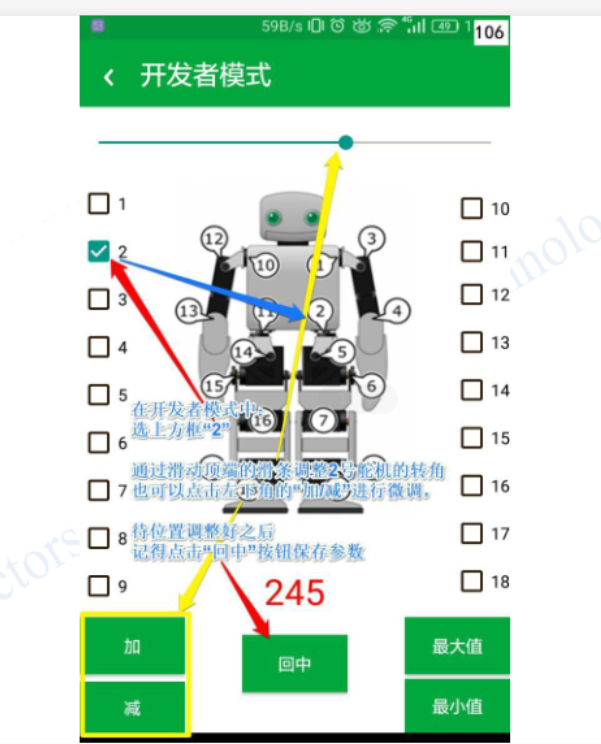
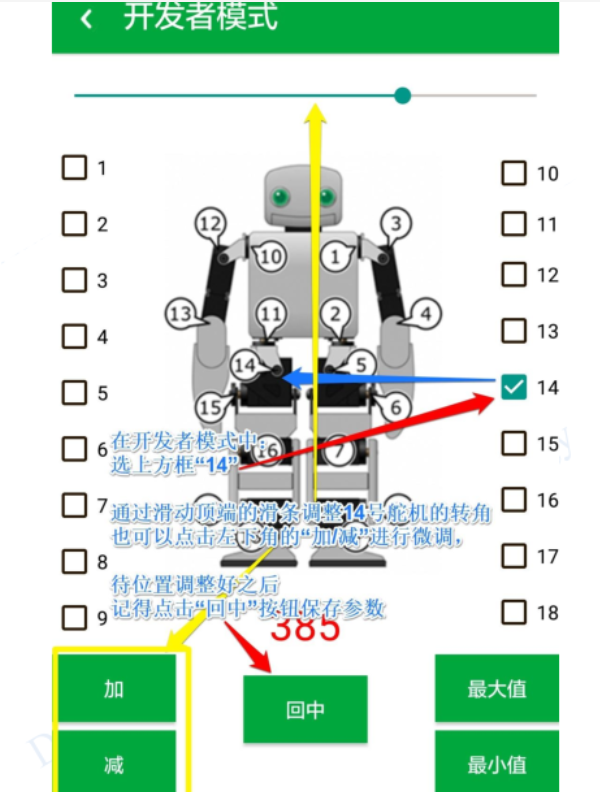
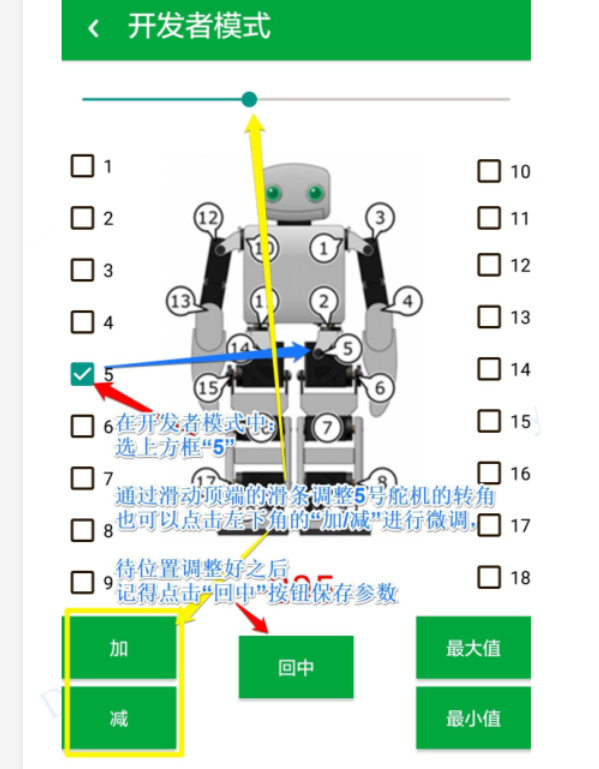
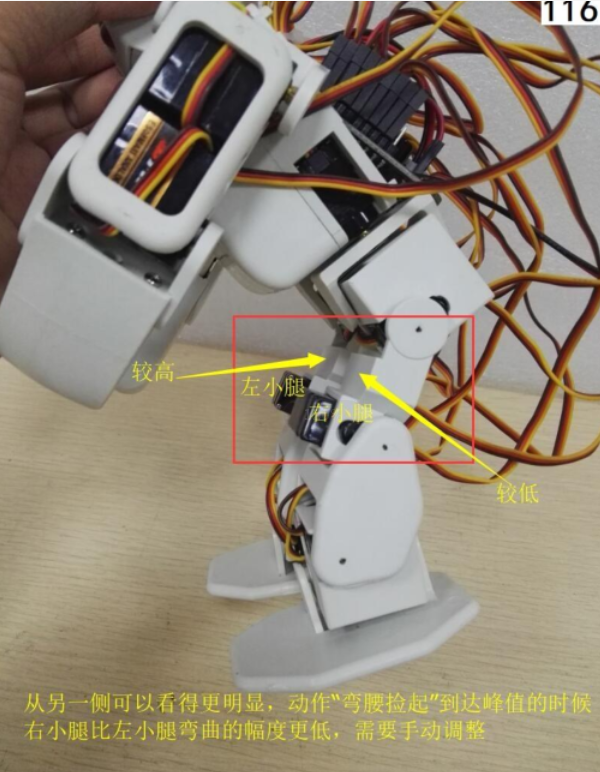
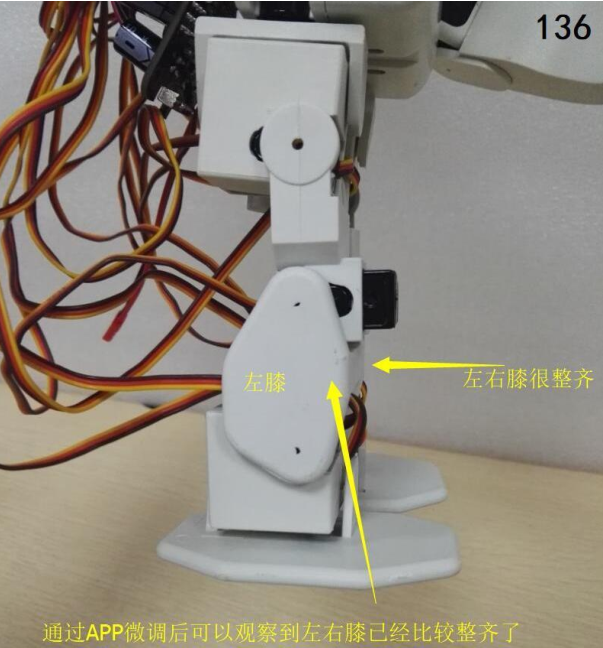
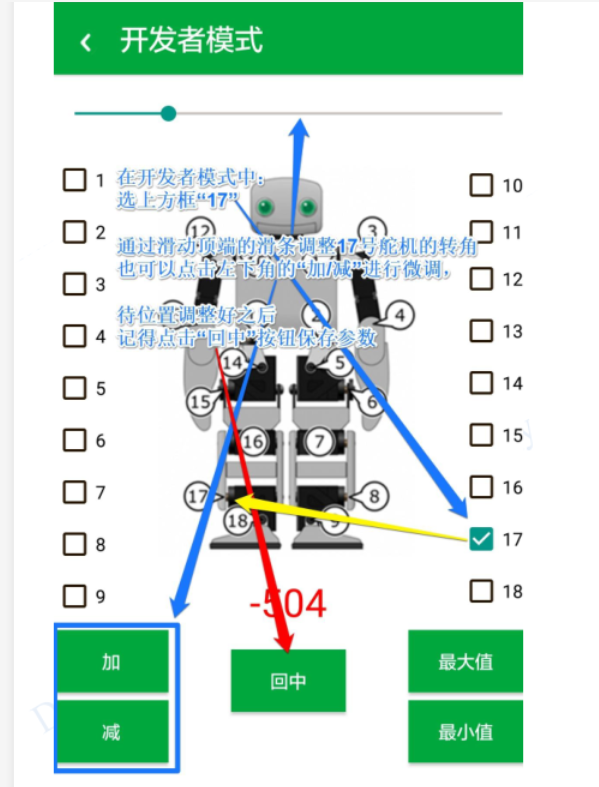
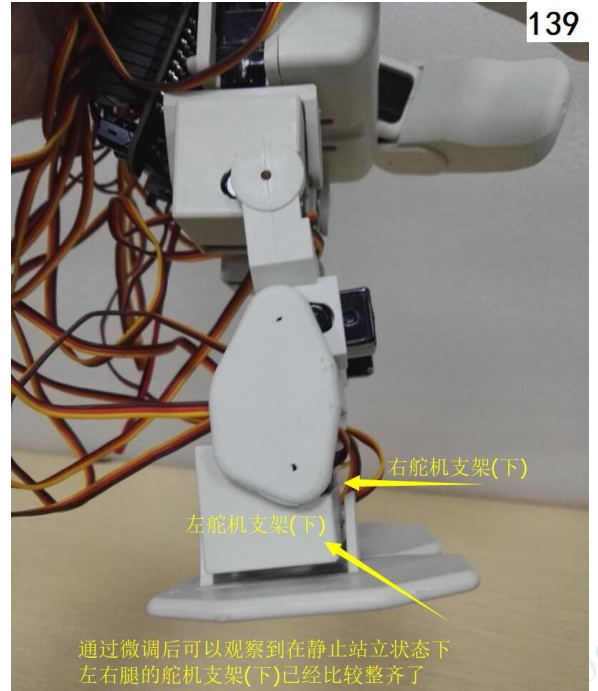
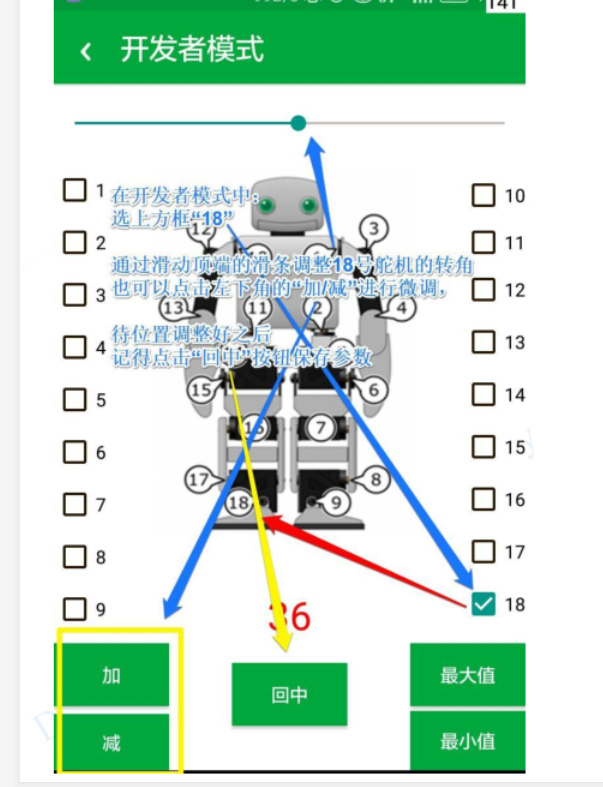
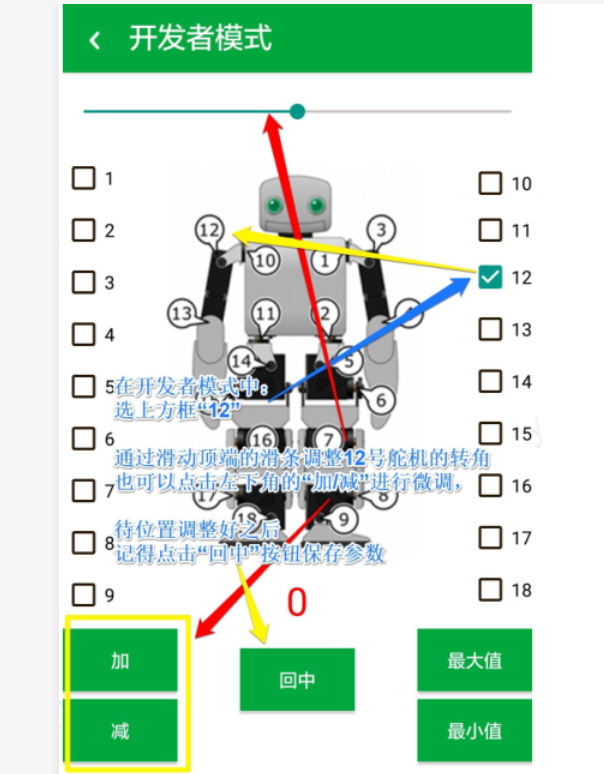
微调:整个机器人安装好后,为了让机器人能顺利完成各项程序设定的动作,必须进行微调。 微调后,机器人的标准是: 1) 机器人的 2 个脚尖在一条线上; 2) 机器人的 2 个脚后跟在一条线上; 3) 机器人的 2 个脚底板在一个平面上; 4) 机器人的站立姿势,应该像个训练有素的军人一样,该垂直的垂直,该水平的水平。 B:微调前的几点注意事项: 1、回中的概念:就是机器人在保持水平垂直的稳定状态时应该有的位置,也是初始位置; 2、如何调试某个舵机(关节):点击相应数字,画钩表示选中,然后拖动“关节位置滑动 条”,较大幅度地调整舵机的位置,点击左下角的“加/减”按钮对舵机进行细微幅度地调节 舵机,最后记得每调节一个舵机完成后都得点击“回中”按钮进行初始状态的保存; 3、图中的数字表示关节(舵机)的编号。 4、微调到何时状态为止才是最好的状态:像个训练有素的军人,2 个脚尖在一条直线上;2 个脚 底板在一个水平面,2 个脚后跟在一条直线;头抬起,挺胸等等
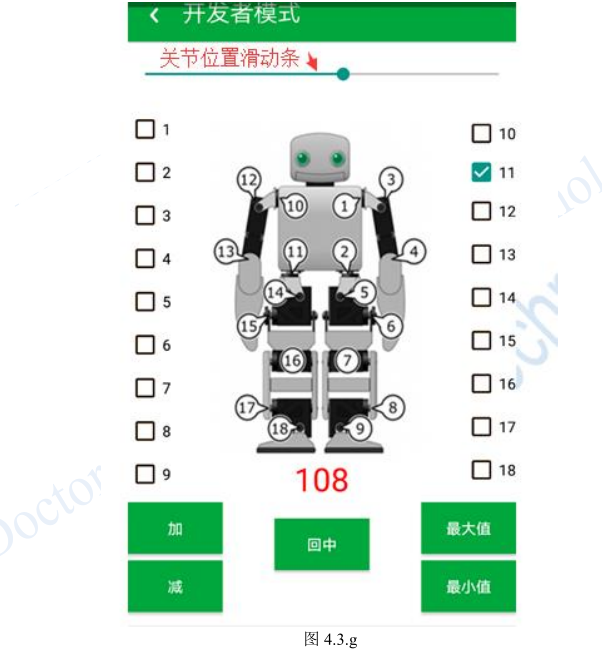
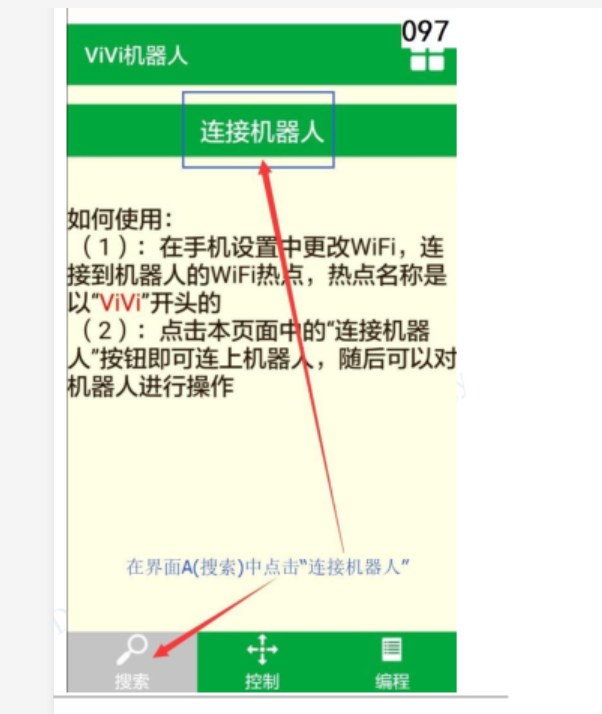
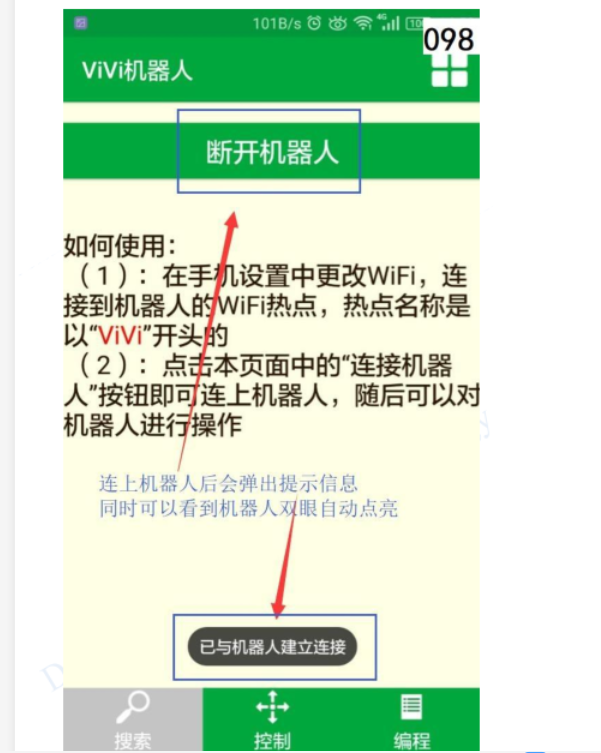
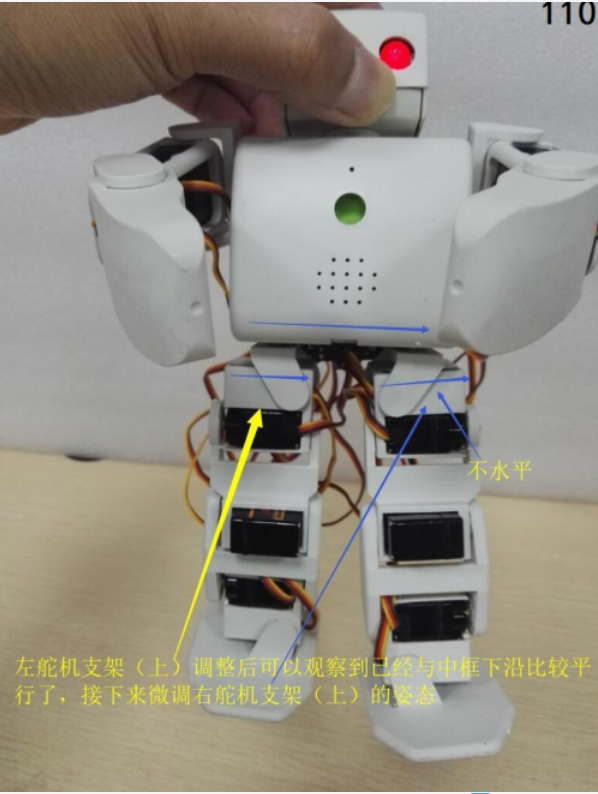
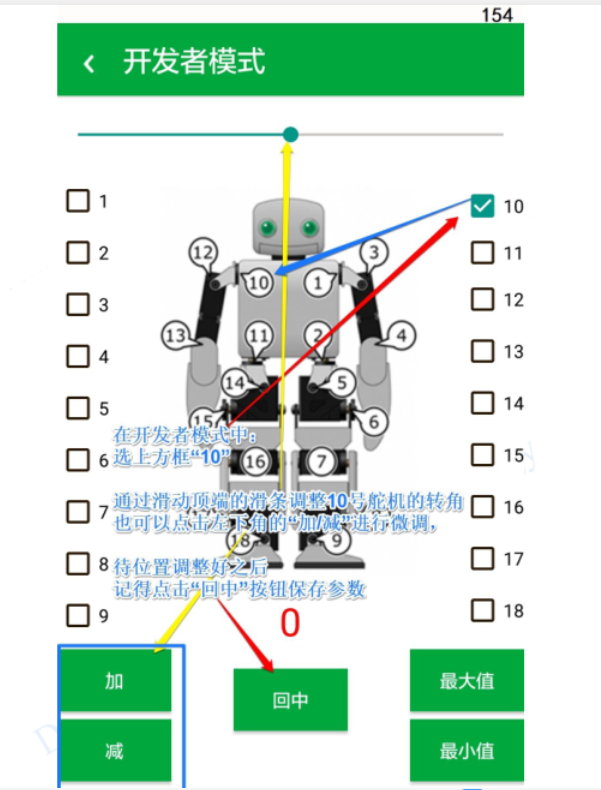
C:关于“开发者模式”的调试经验: 1、 进入调试界面后根据相应的舵机序号调整机器人的位置让机器人保持站立姿态如图 4.3.g 所 示,比如机器人的 2 个脚尖不是在一条水平线上,则调整舵机(关节)18 和 9,使得 2 个脚 尖在一条直线上,调整完后,点击“回中”,以保存当前位置作为机器人的标准初始位置。 2、 每个关节位置调整完之后需要点击回中键来保存。 3、 微调后,返回 APP 中控制子菜单,让其行走数步,看其是否步伐稳定。若不稳定,继续调整 初始位置。以我们调试经验,比如如果行走时,往后倾倒,则可以调整舵机(关节)15 和 6 或者 17 和 8。 4、 最后调整的位置基本如图 4.3.g 所示,整齐,直立,水平。 以下是具体的调试过程: ① APP 的初步使用 首先开启机器人的电源开关,再打开手机 WiFi功能,搜索周围热点,然后按下列图示进行操作;



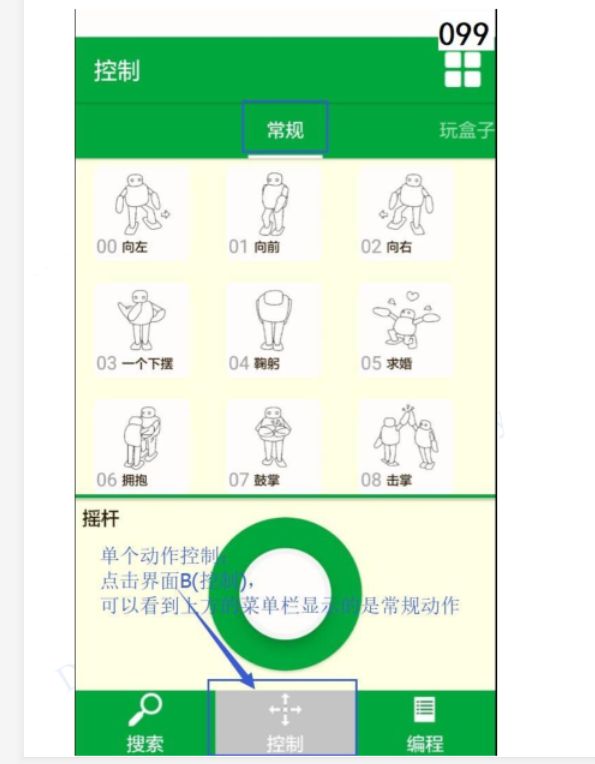


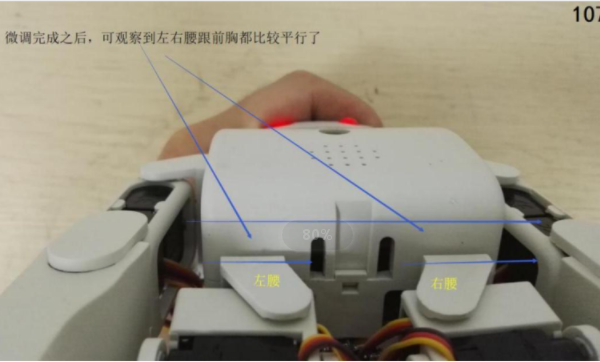
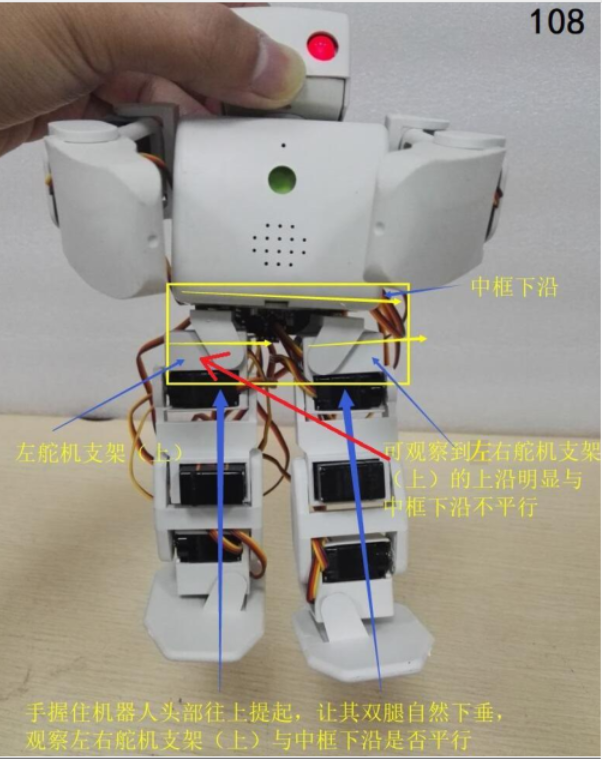
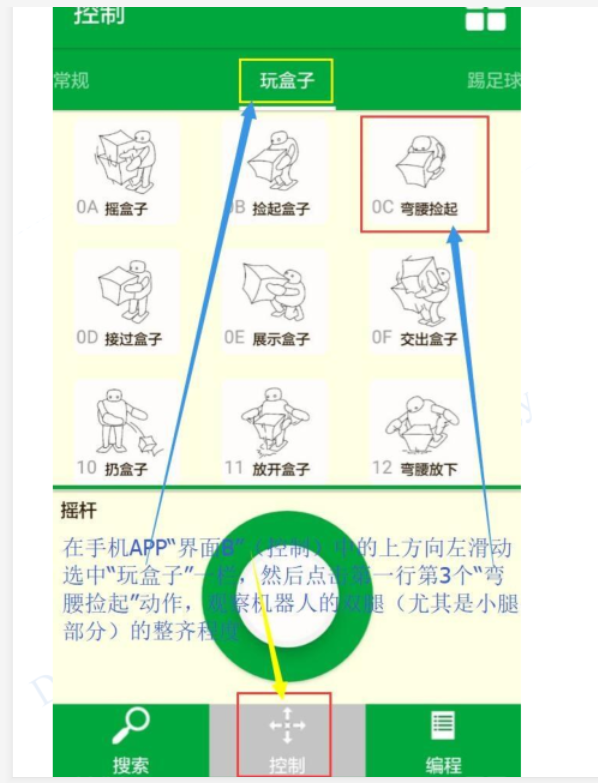
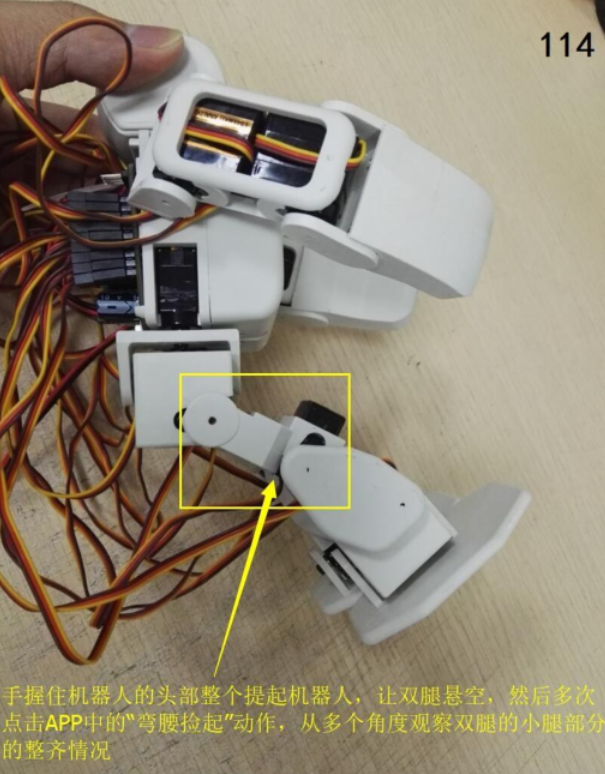
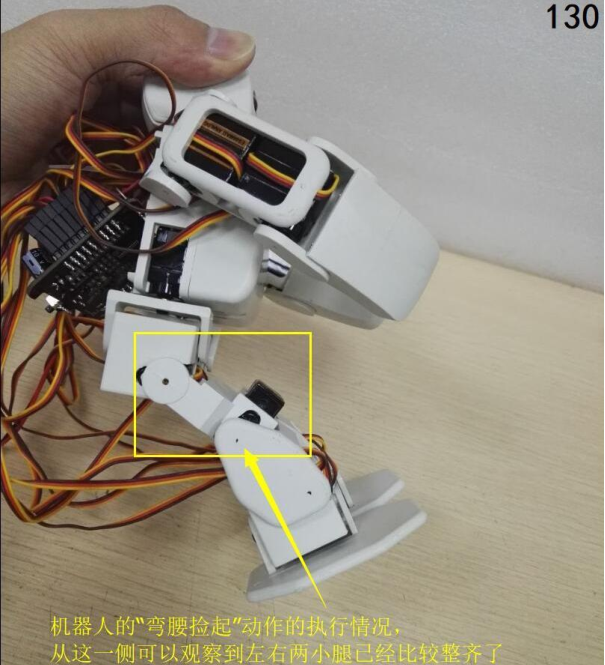
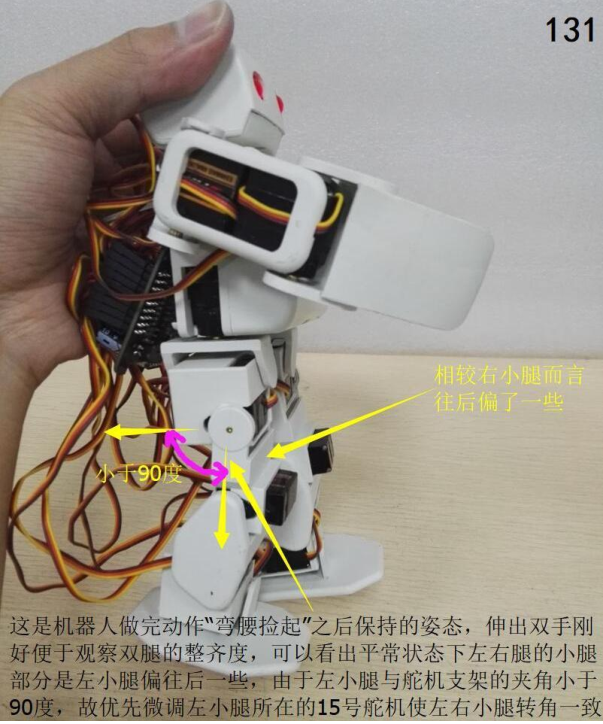
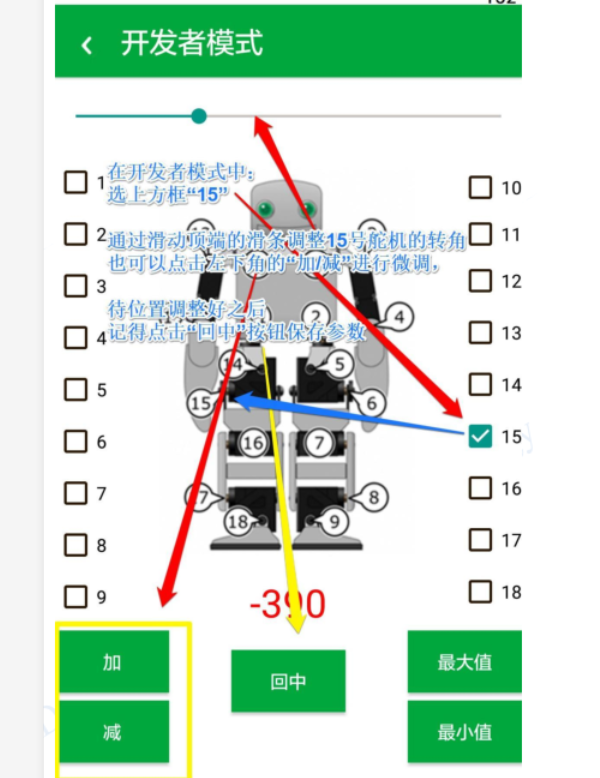
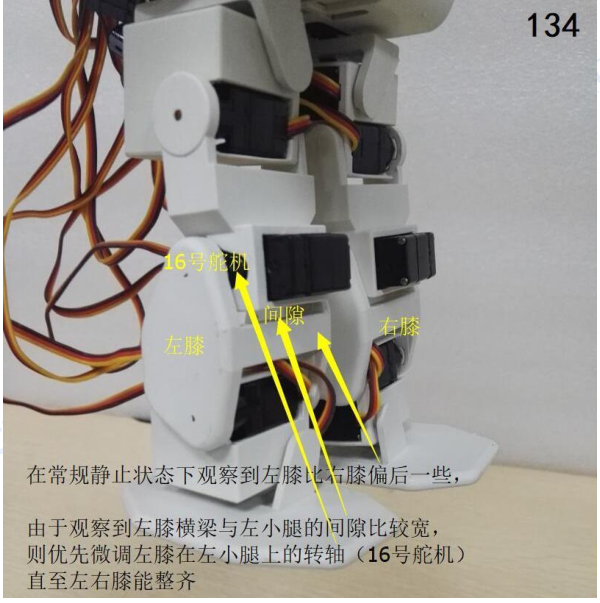
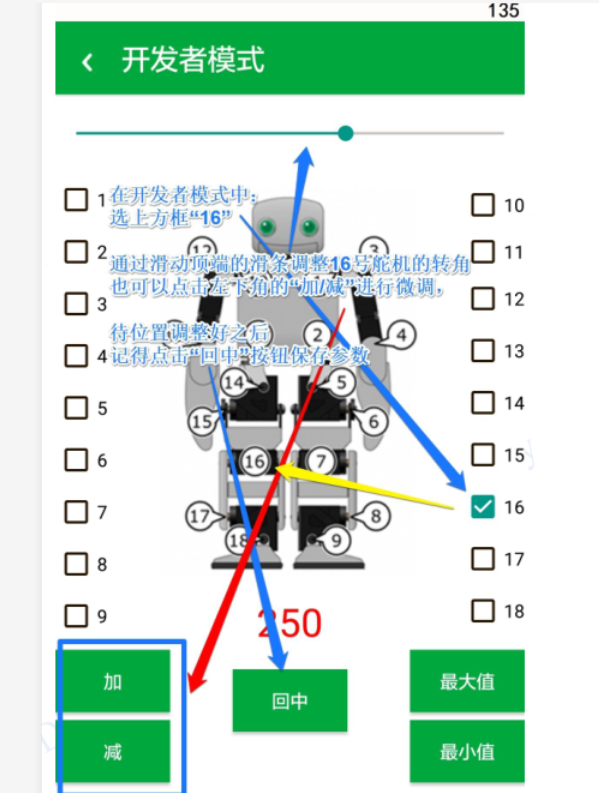
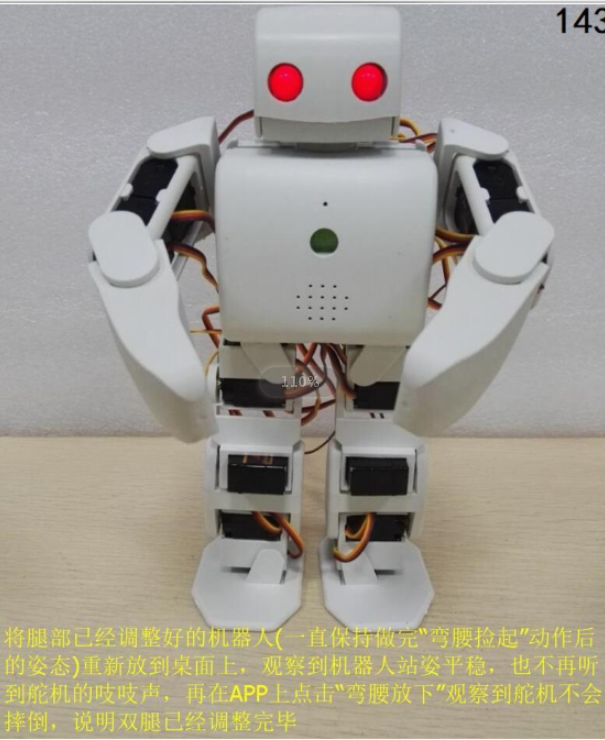
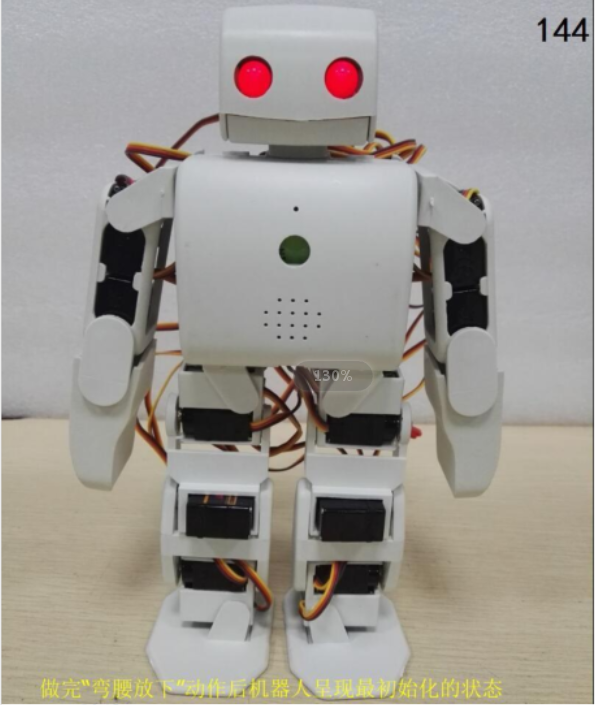
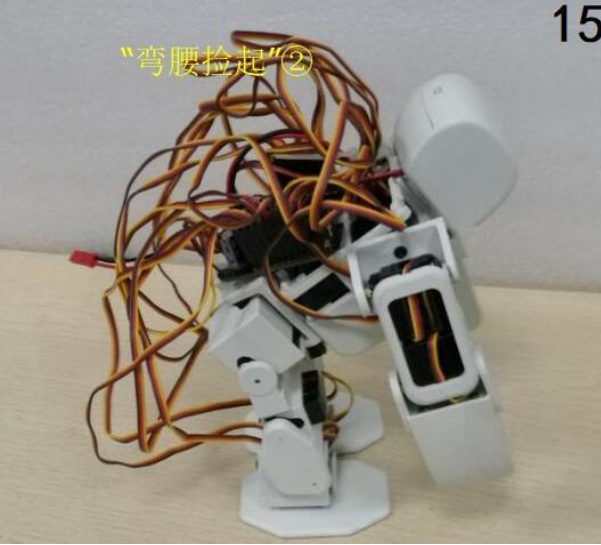
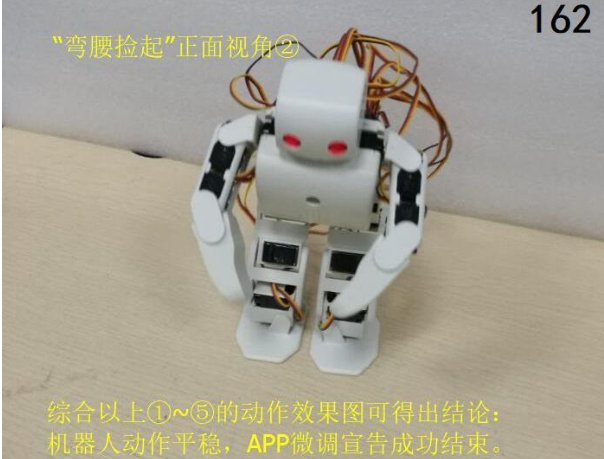
② 调试双腿整齐













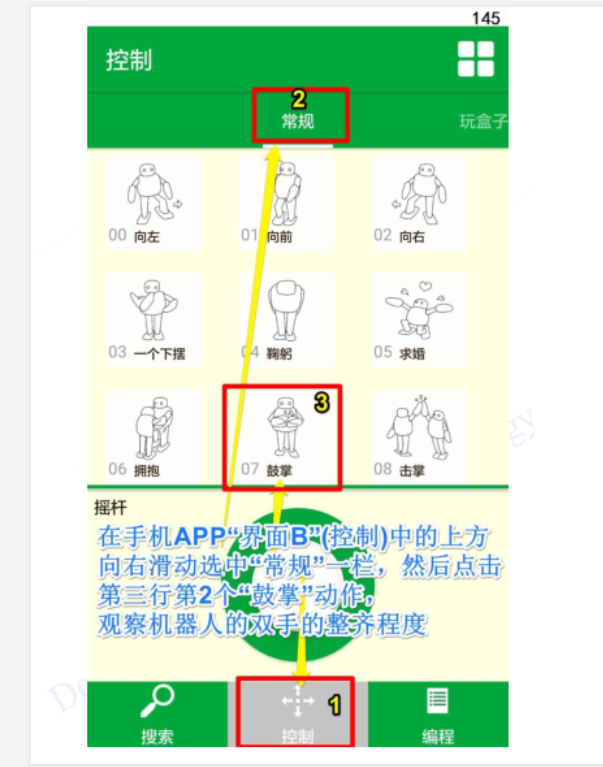
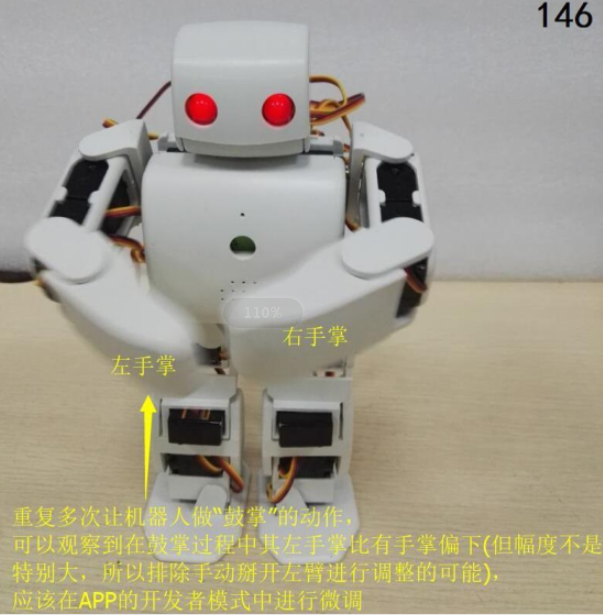
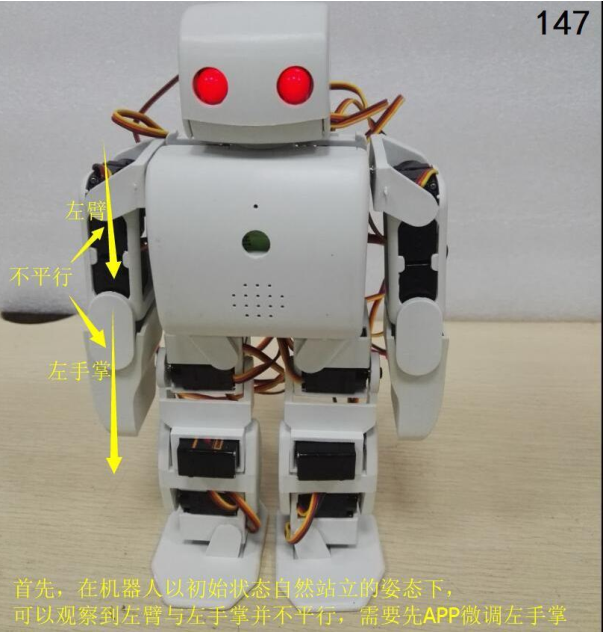
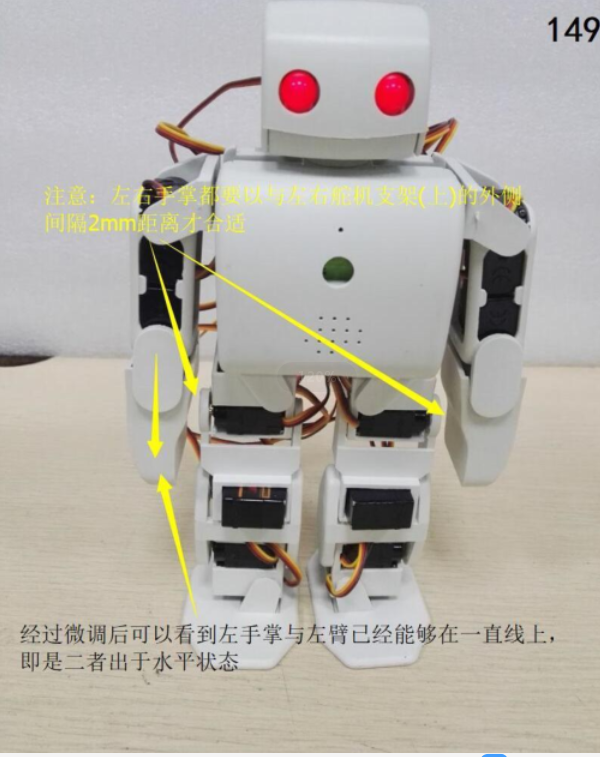
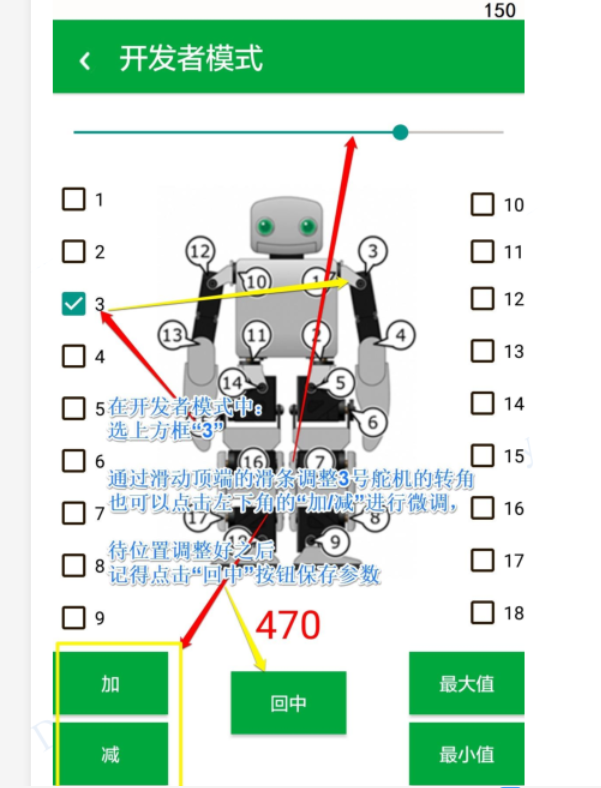
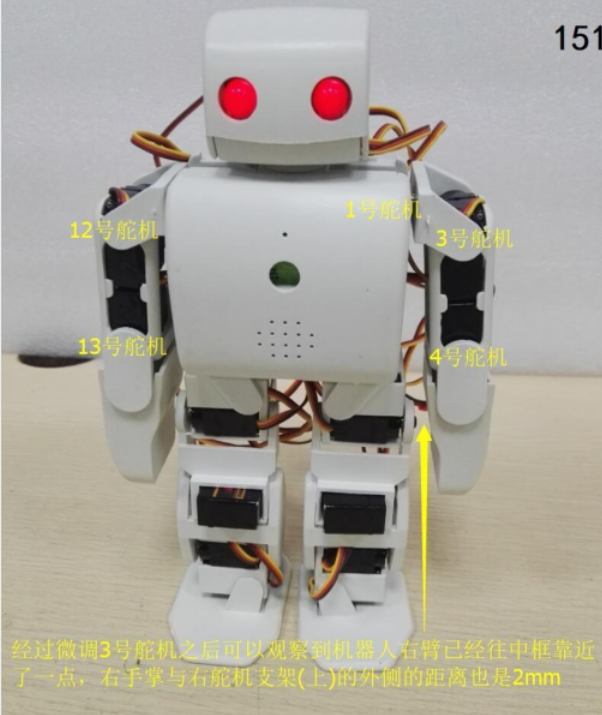
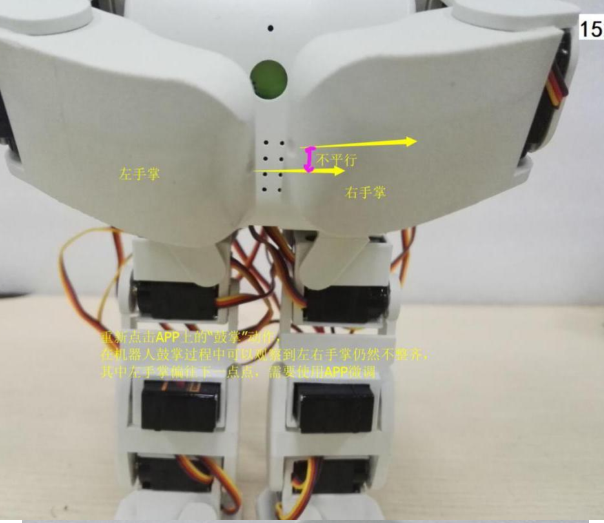
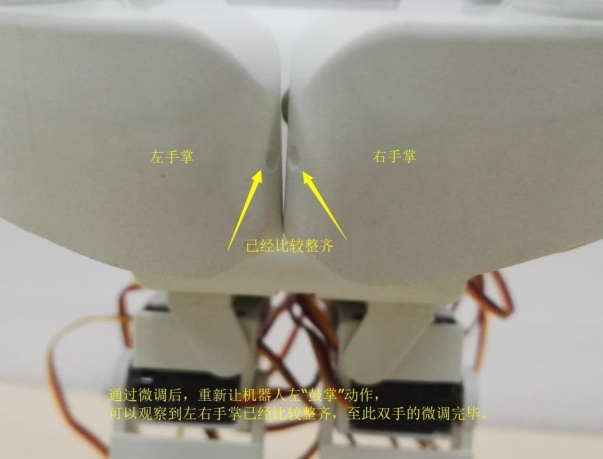
③ 调试双手整齐






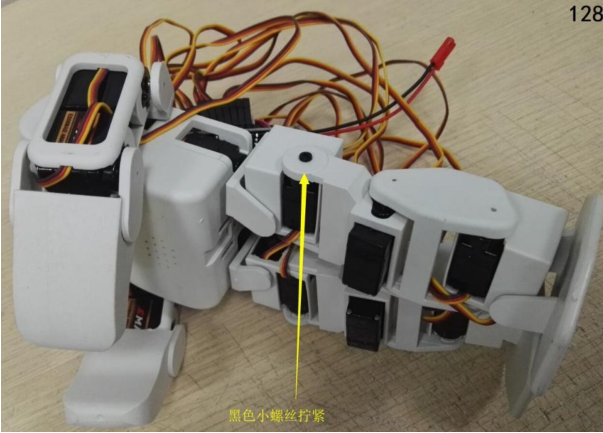
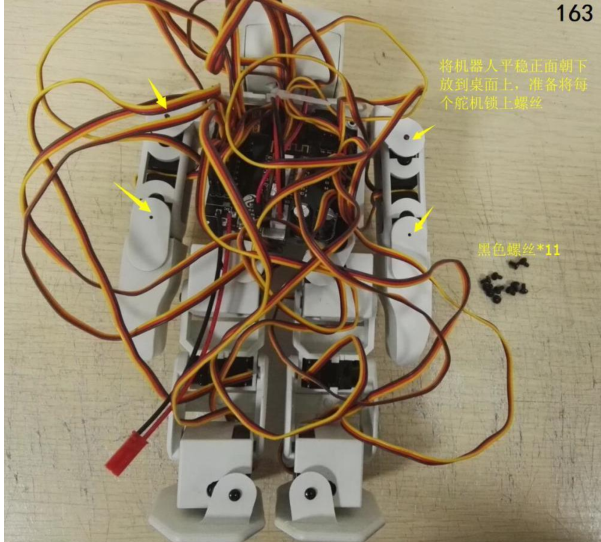
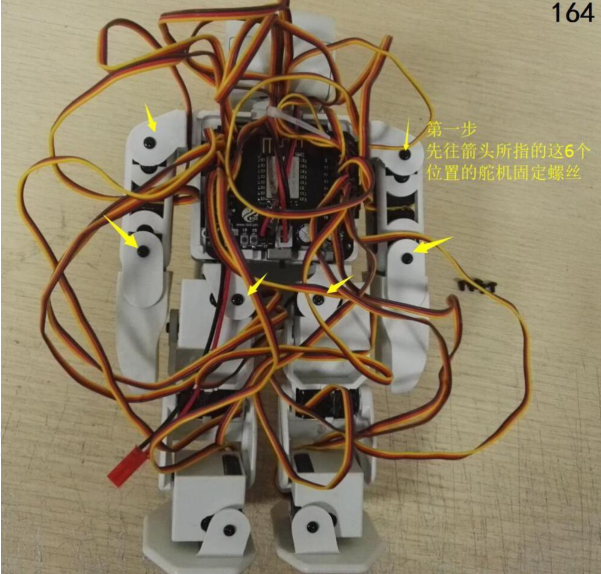
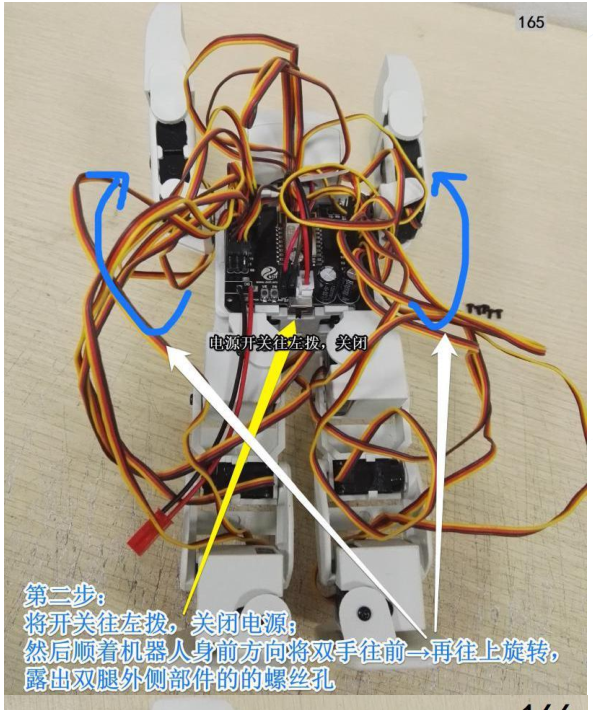
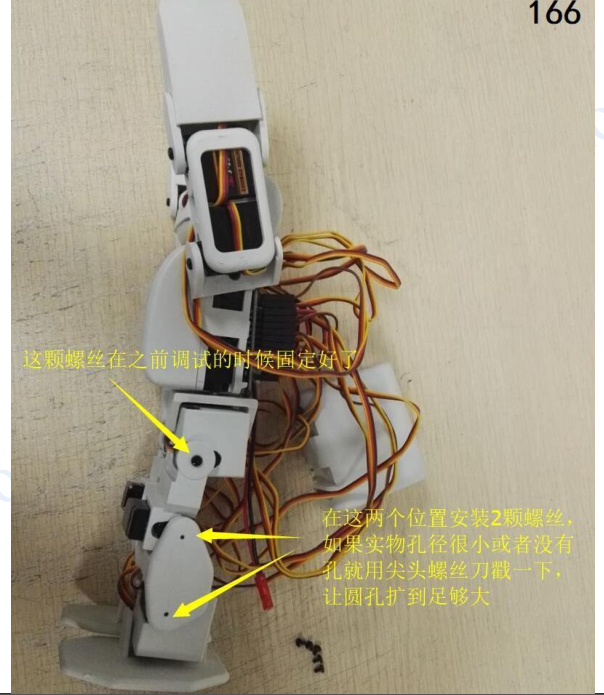
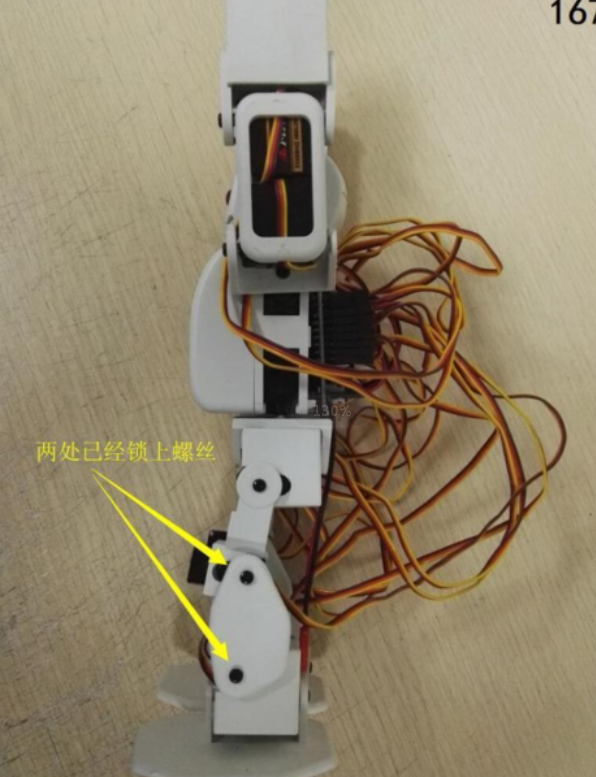
h .锁上螺丝


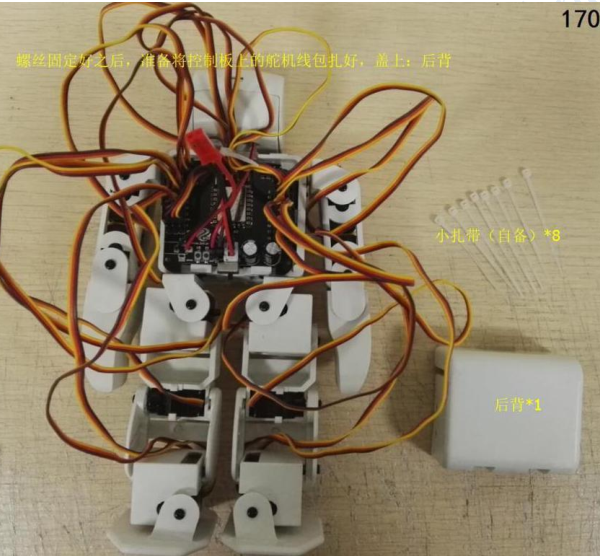
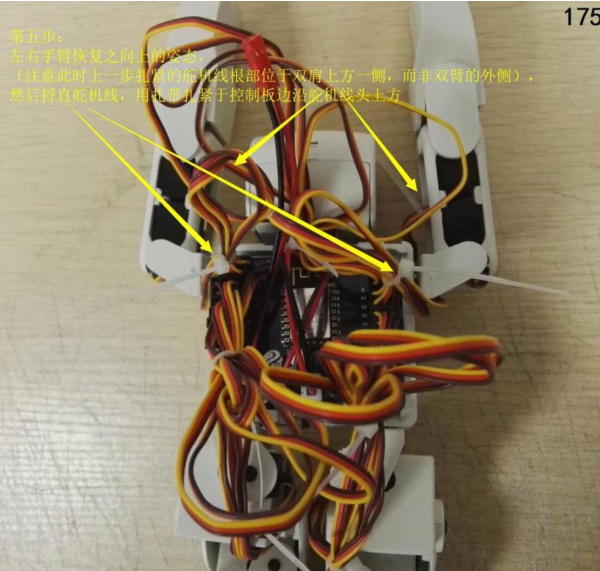
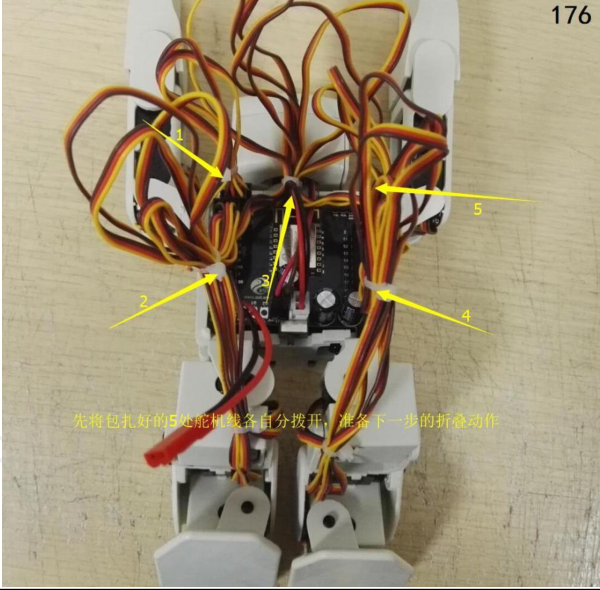
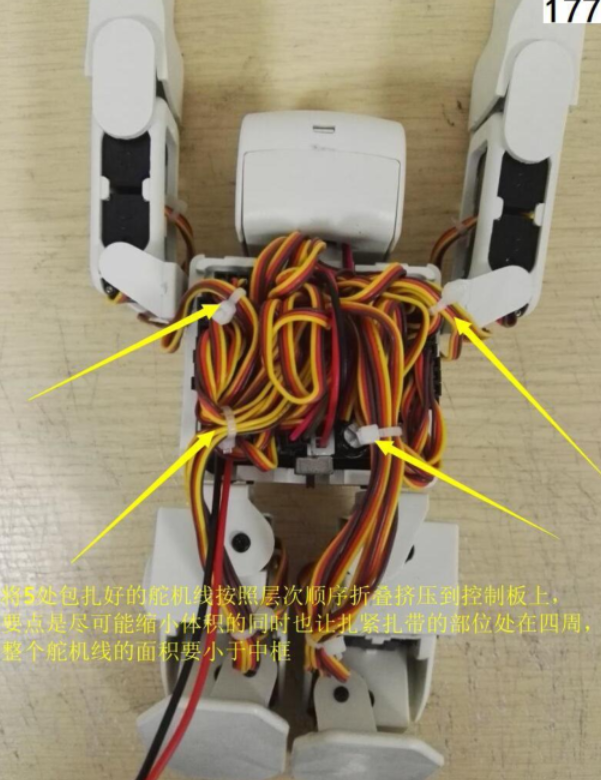
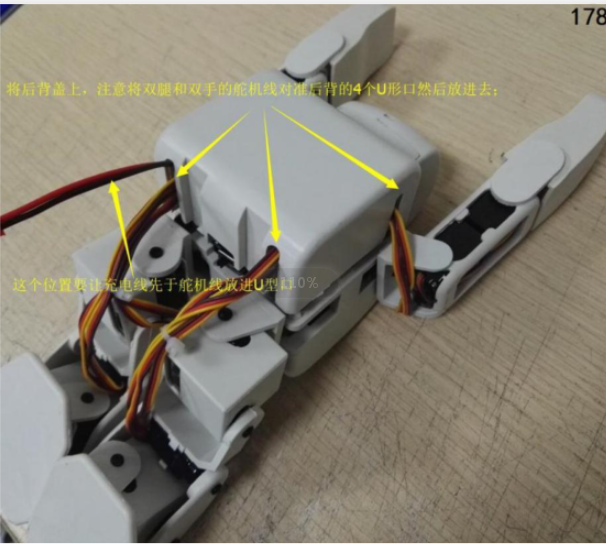
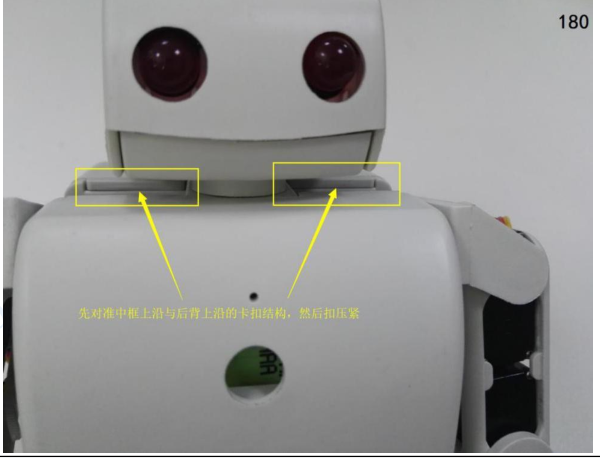
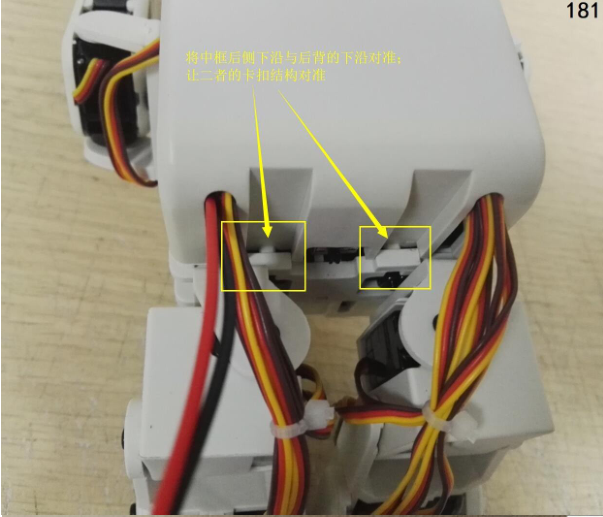
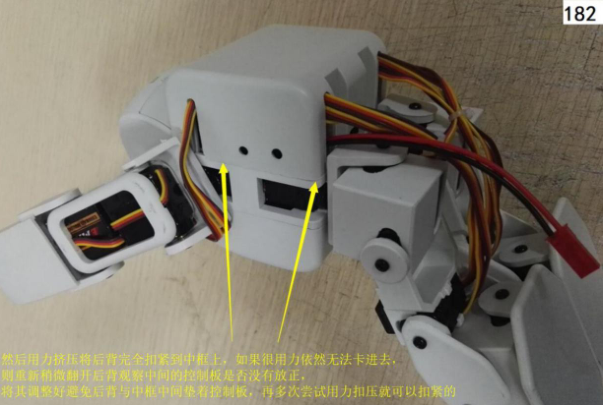
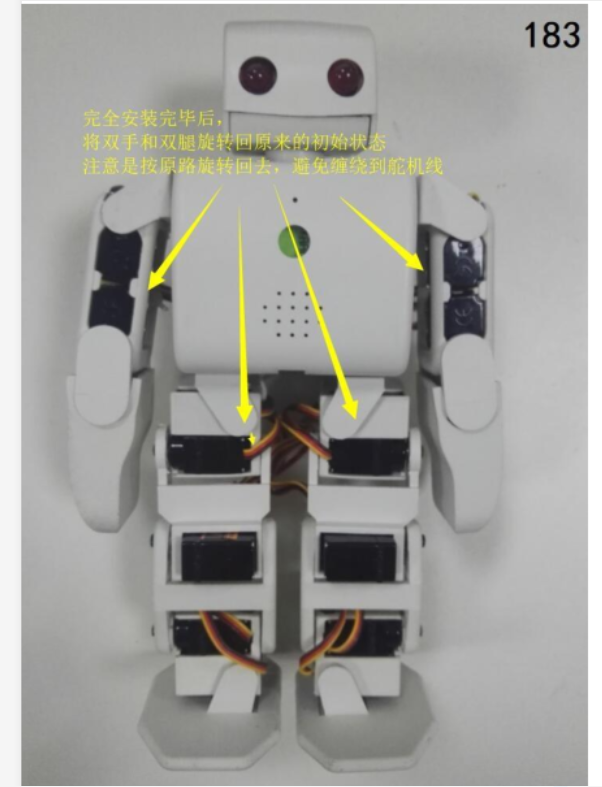
i. 装上后背



2.2.8.4. 更多资源,请关注公众号!#
