2.2.6. 17自由度人形机器人安装说明#
2.2.6.1. 一、各元件的认识与准备#
1、配齐安装结构支架

上图由左向右、从上到下所示结构支架名称依次为:U 型梁支架、大脚板、多功能支架、长U 支架、短U 支架、L 型支架、一字支架、斜U 支架
2、配齐安装螺丝和五金配件

上图由左向右、从上到下所示五金配件名称依次为:圆头M4x8 螺丝(M4 螺母)、圆头M3x10 螺丝(M3 螺母)、圆头M3x7 螺丝(M3 螺母)、平头M3x6 螺丝(M3 螺母)、尼龙塑料平头M3x20 螺丝(M3x6 塑料螺柱)、圆头M3x6 螺丝、圆头M3x5 螺丝、金属舵盘、法兰轴承
3、配齐安装工具

• 上图由左向右、从上到下所示工具名称依次为:尖嘴钳、十字(一字)螺丝刀、十字(一字)电动螺丝刀、镊子
• 尖嘴钳:主要用于夹持螺母,或者螺母安装完毕紧固螺母,使结构更加稳定。
• 十字(一字)螺丝刀:主要用于安装各种型号螺丝。
• 十字(一字)电动螺丝刀:可以快速拧紧或者拆卸螺丝,加快安装速度,更专业化,通常用电
• 动螺丝刀快速拧紧螺丝,再使用尖嘴钳手动加固螺丝。
• 镊子:对于部分结构位置手指不容易够到,可使用镊子递送螺丝螺母。
2.2.6.2. 二、安装结构件#
准备齐全上述结构件、五金螺丝配件和安装工具,下面进入安装环节,首先安装机器人各部分支架结构
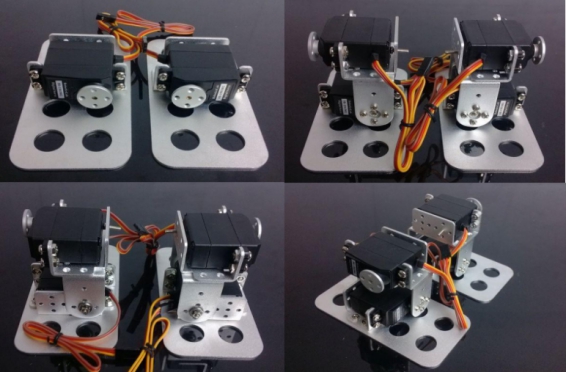
2.2.6.2.1. 1、安装机器人脚掌结构#
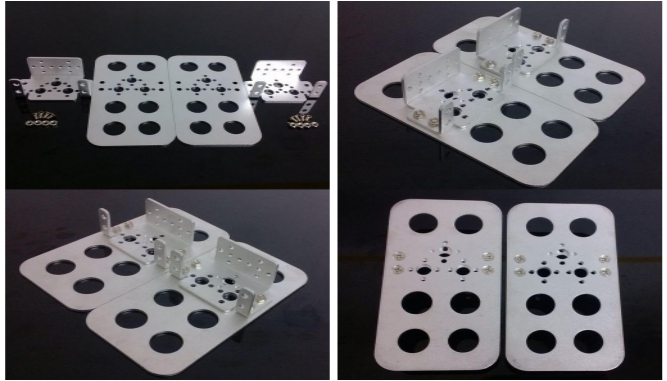
• 取大脚板2 个、多功能支架2 个、平头M3x6 螺丝8 个,M3 螺母8 个,如图所示进行安装。安装过程中注意大脚板沉孔朝下,这样可以将螺丝帽埋进沉孔,使底部光滑,另外安装时候注意多功能支架放置位置水平,左右对齐,因为孔径稍大,有一定晃动,所以安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.2.2. 2、安装机器人脚踝结构#
取多功能支架2 个、短U 支架2 个、圆头M3x7 螺丝8 个,M3 螺母8 个,如图所示进行安装。安装过程中螺帽朝上,螺母朝下,注意多功能支架与短U 支架连接时候保持对齐,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.2.3. 3、安装机器人小腿结构#
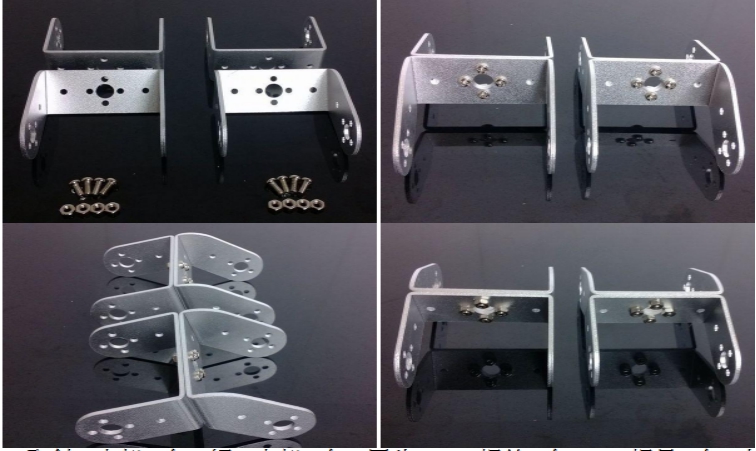
取斜U 支架2 个、短U 支架2 个、圆头M3x7 螺丝8 个,M3 螺母8 个,如图所示进行安装。安装过程中螺帽在斜U 上,螺母在短U 上,注意斜U 支架与短U 支架连接时候保持对齐,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
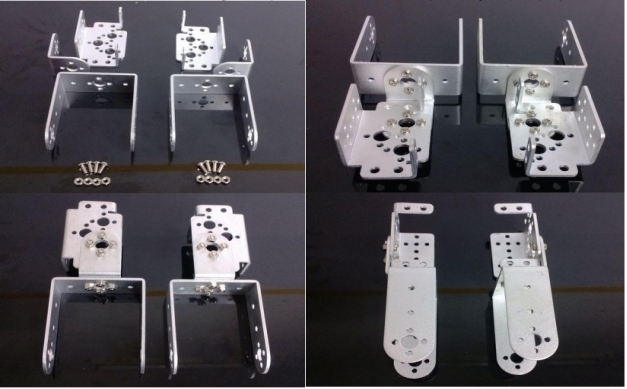
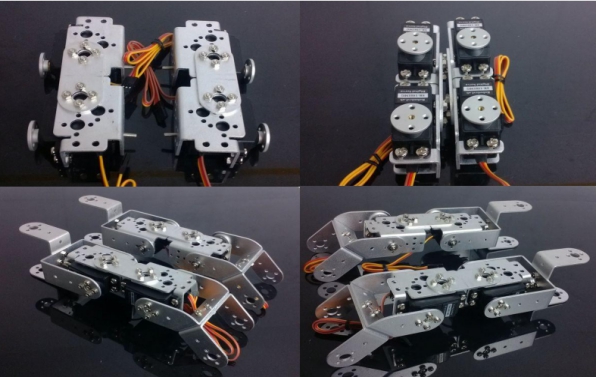
2.2.6.2.4. 4、安装机器人大腿结构#
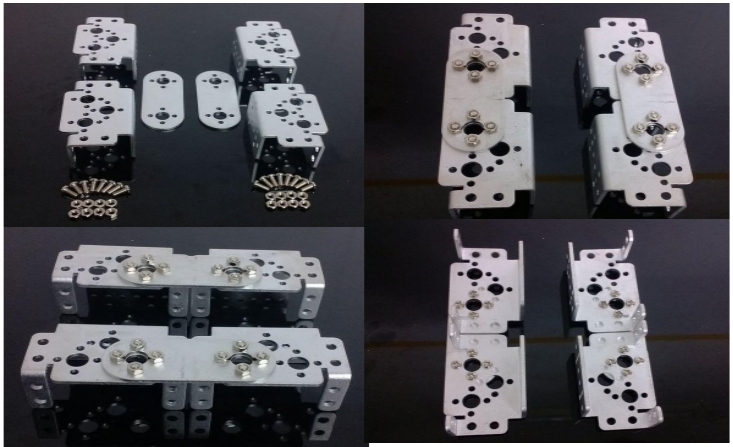 取多功能支架4 个、一字型支架2 个、圆头M3x7 螺丝16 个,M3 螺母16 个,如图所示进行安装。安装过程中螺丝由多功能支架内部穿出,螺母在外紧固,注意两个多功能支架由一字型连接片连接保持竖直对齐,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
取多功能支架4 个、一字型支架2 个、圆头M3x7 螺丝16 个,M3 螺母16 个,如图所示进行安装。安装过程中螺丝由多功能支架内部穿出,螺母在外紧固,注意两个多功能支架由一字型连接片连接保持竖直对齐,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
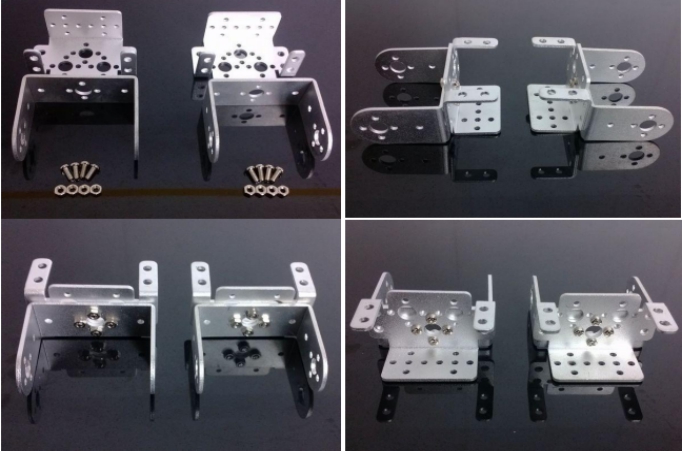
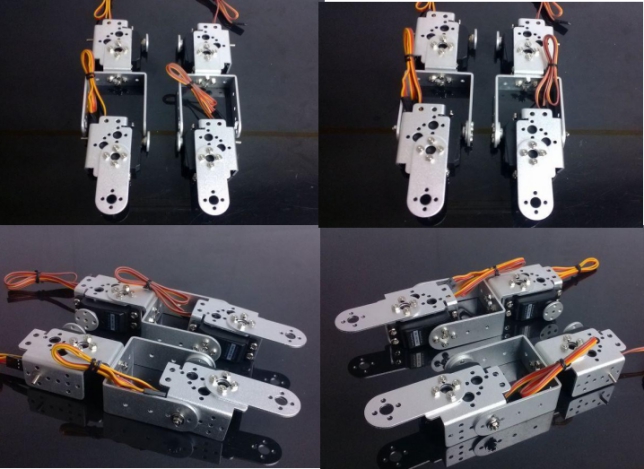
2.2.6.2.5. 5、安装机器人跨部结构#
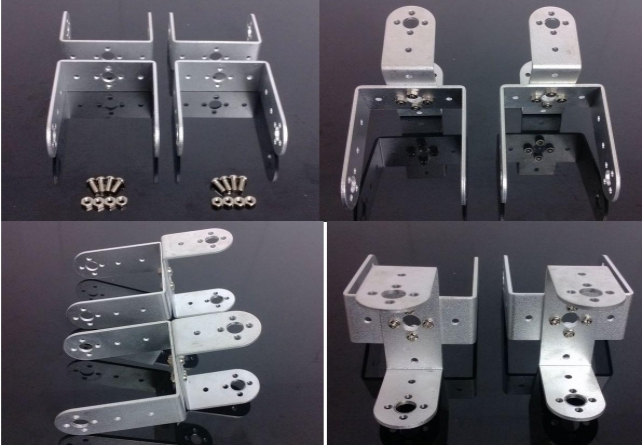
• 取长U 支架2 个、短U 支架2 个、圆头M3x7 螺丝8 个,M3 螺母8 个,如图所示进行安装。安装过程中螺丝由短U 支架内部穿出,螺母在长U 支架顶部紧固,短U 支架与长U支架呈十字交叉垂直安装,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
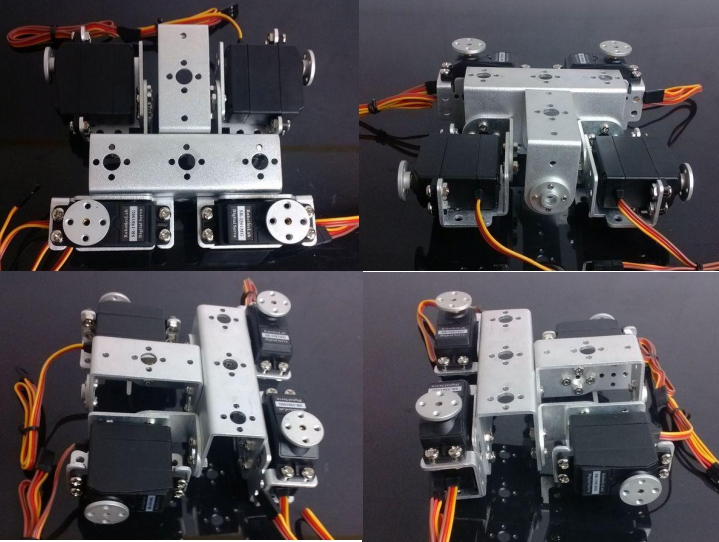
2.2.6.2.6. 6、安装机器人躯干结构#
 取多功能支架4 个、短U 支架1 个、U 型梁支架1 个、L 型支架2 个、圆头M3x7 螺丝28 个,M3 螺母28 个,如图所示进行安装。机器人躯干部分主要由双肩部、双髋部和颈部支架构成,安装过程中螺丝均由内侧向外侧穿出固定,这样才不影响舵机的安装,便于尖嘴钳固定,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果,所有的安装固定最后都要确认支架固定的位置方向正、不偏斜。
取多功能支架4 个、短U 支架1 个、U 型梁支架1 个、L 型支架2 个、圆头M3x7 螺丝28 个,M3 螺母28 个,如图所示进行安装。机器人躯干部分主要由双肩部、双髋部和颈部支架构成,安装过程中螺丝均由内侧向外侧穿出固定,这样才不影响舵机的安装,便于尖嘴钳固定,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果,所有的安装固定最后都要确认支架固定的位置方向正、不偏斜。
2.2.6.2.7. 7、安装机器人手臂结构#
取多功能支架2 个、长U 支架2 个、L 型支架2 个、圆头M3x7 螺丝16 个,M3 螺母16 个,如图所示进行安装。安装过程中螺丝均由内侧向外侧穿出固定,这样才不影响舵机的安装,便于尖嘴钳固定,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果,所有的安装固定最后都要确认支架固定的位置方向正、不偏斜
2.2.6.2.8. 8、安装机器人手腕结构#
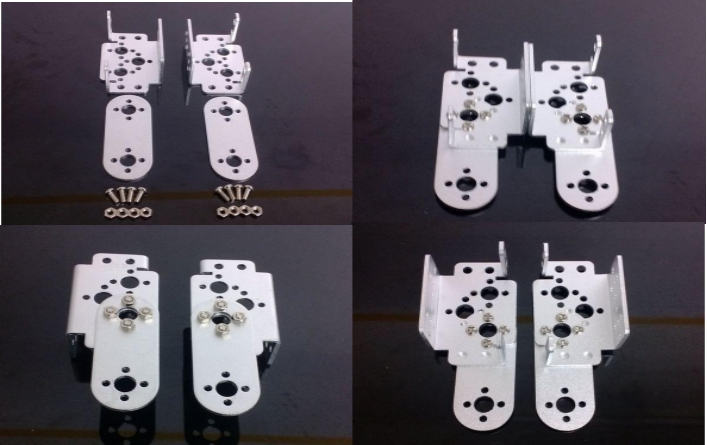
取长多功能支架2 个、一字型支架2 个、圆头M3x7 螺丝8 个,M3 螺母8 个,如图所示进行安装。安装过程中螺丝由多功能支架内部穿出,螺母在一字支架顶部紧固,安装 好螺丝需用尖嘴钳紧固,达到稳定结构效果。
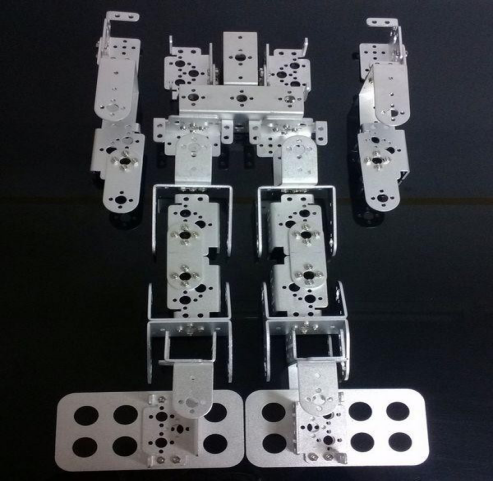
2.2.6.2.9. 三、安装机器人关节——舵机#
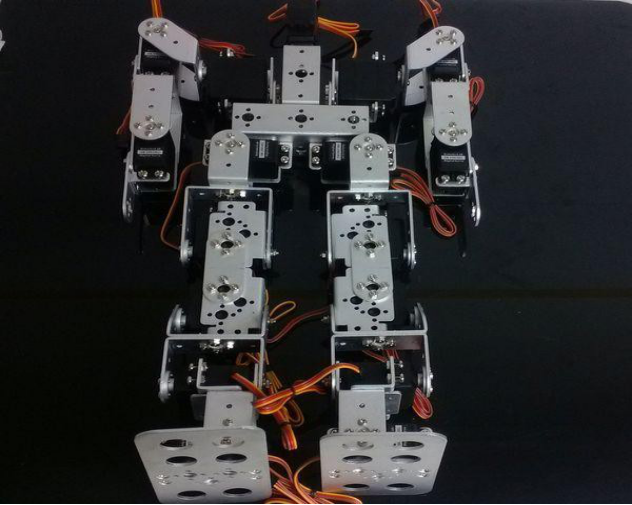
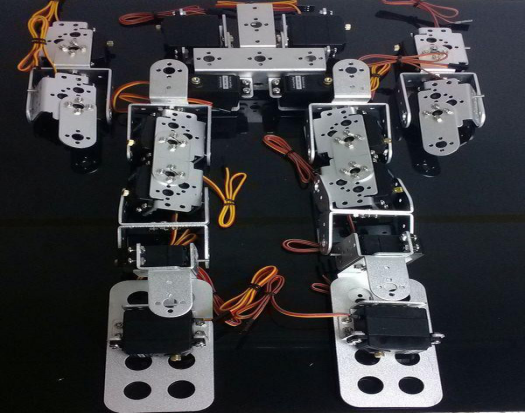
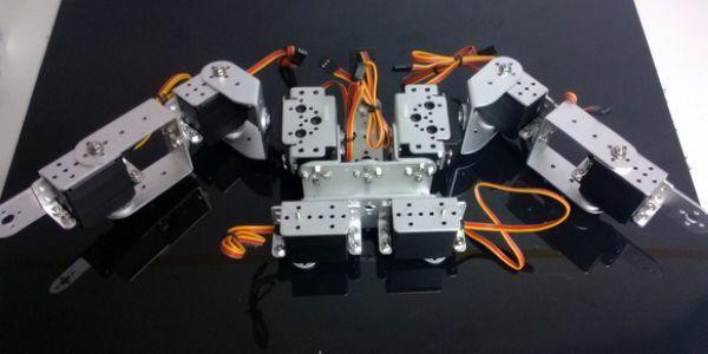
经过步骤二,我们已经将机器人全身结构部分安装完毕,下面我们回顾下所有安装好的结构部分。首先,按照人体结构的形式排列放好,如下图所示;然后,开始安装每一部分的关节。
所有的舵机出厂默认调整到中间位置(即舵机左右活动范围最大位置),安装舵机前,最好不要旋转舵机,如果无意中旋转了舵机, 需用上位机软件调整到中间位置,或者用舵 机测试仪调整到中间位置,舵机中间位置值 为1500。以下以数字舵机为例图解安装过程。
2.2.6.2.10. 1、安装机器人脚掌舵机#
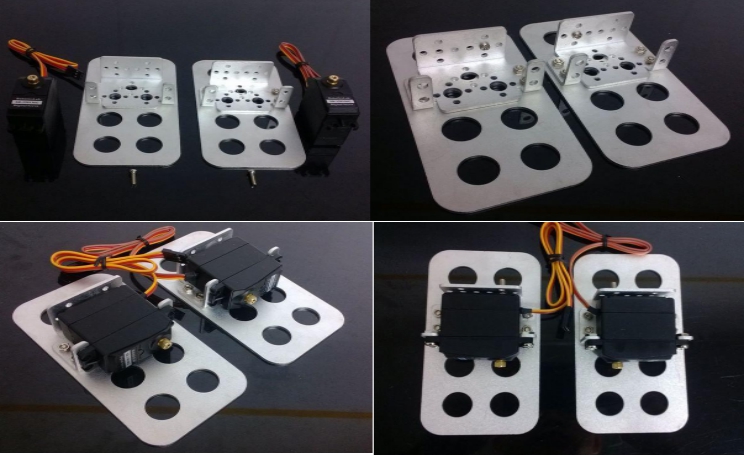
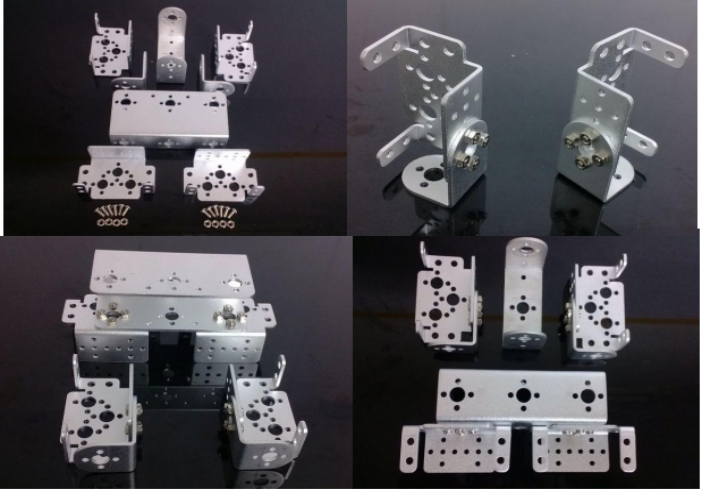
取安装好的机器人左右脚掌结构各1 个、伺服舵机2 个、圆头M3x10 螺丝2 个,圆头M4x8 螺丝8 个、M4 螺母4 个。首先如图所示,将M3x10 螺丝由多功能支架内部向外穿出安装,该螺丝用于后面安装法兰轴承,所以在安装舵机前必须先把该螺丝位置安装好, 注意:M3x10 螺丝的安装位置,必须在多功能支架的内侧正中间孔位,保持与舵机的伸出轴承在一条水平线上。安装舵机,用M4x8 螺丝和M4 螺母分别固定舵机的4 个拐角与多功能支架上,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.2.11. 2、安装机器人脚踝舵机#
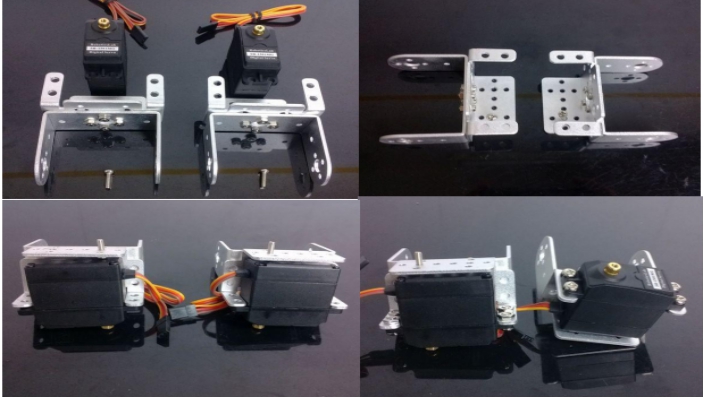
取安装好的机器人左右脚踝结构各1 个、伺服舵机2 个、圆头M3x10 螺丝2 个,圆头M4x8 螺丝8 个、M4 螺母4 个。首先如图所示,将M3x10 螺丝由多功能支架内部向外穿出安装,该螺丝用于后面安装法兰轴承,所以在安装舵机前必须先把该螺丝位置安装好,注意:M3x10 螺丝的安装位置,必须在多功能支架的内侧正中间孔位,保持与舵机的伸出轴承在一条水平线上。安装舵机,用M4x8 螺丝和M4 螺母分别固定舵机的4 个拐角与多功能支架上,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
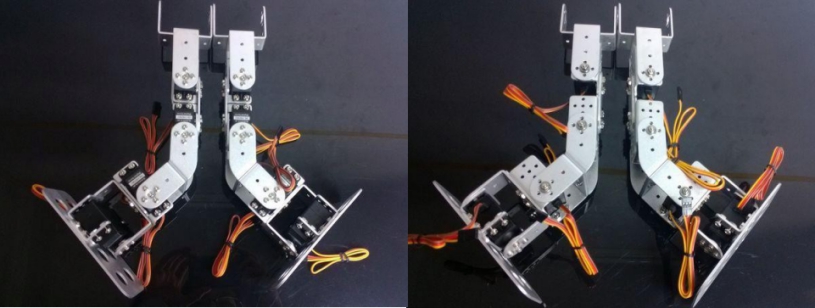
2.2.6.2.12. 3、安装机器人腿部舵机#
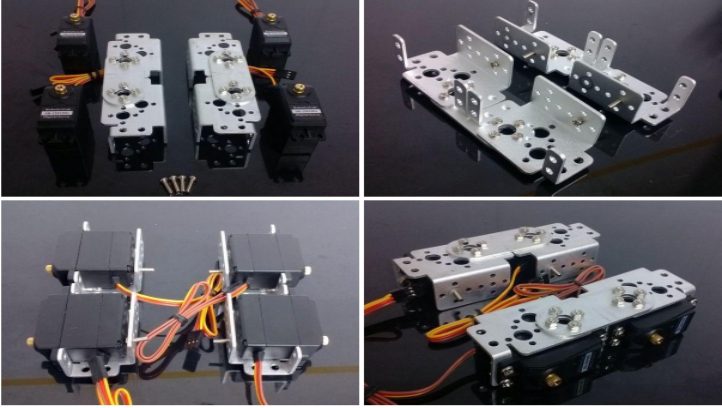
取安装好的机器人左右大腿结构各1 个、伺服舵机4 个、圆头M3x10 螺丝4 个,圆头M4x8 螺丝16 个、M4 螺母16 个。首先如图所示,将M3x10 螺丝由多功能支架内部向外穿出安装,该螺丝用于后面安装法兰轴承, 所以在安装舵机前必须先把该螺丝位置安装好,注意:M3x10 螺丝的安装位置,必须在多功能支架的内侧正中间孔位,保持与舵机的伸出轴承在一条水平线上。安装舵机,用M4x8 螺丝和M4 螺母分别固定舵机的4 个拐角与多功能支架上,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果
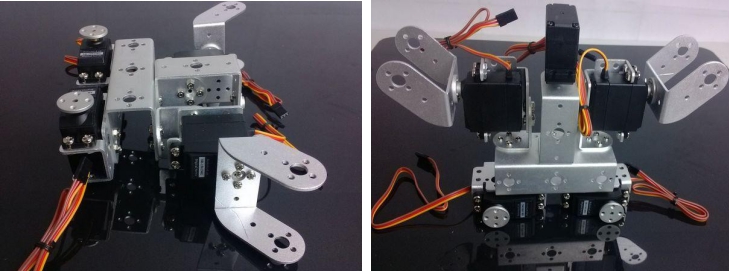
2.2.6.2.13. 4、安装机器人躯干舵机#
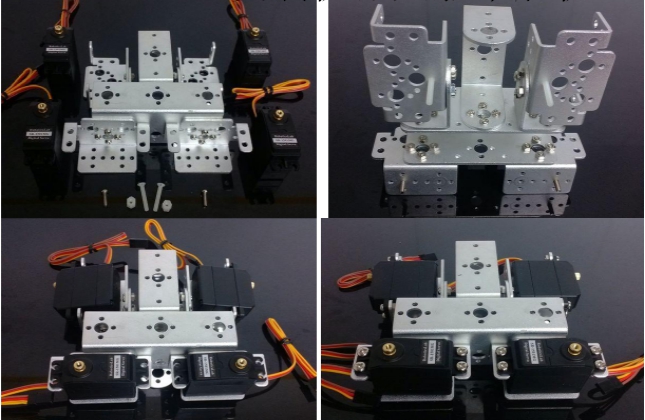
取安装好的机器人躯干结构1 个、伺服舵机4 个、圆M3x10 螺丝2 个,圆头M4x8螺丝16 个、M4 螺母16 个、尼龙塑料平头M320 螺丝2 个、塑料M36 螺柱2 个。首先如图所示,将M3x10 螺丝由多功能支架内部向外穿出安装该螺丝用于后面安装法兰轴承;塑料螺丝按照上图所以穿出,用于安装控制器。所以在安装舵机前必须先把该螺丝位置安装好,注意:M3x10 螺丝的安装位置,必须在多功能支架的内侧正中间孔位,保持与舵机的伸出轴承在一条水平线上。安装舵机,用M4x8 螺丝和M4 螺母分别固定舵机的4 个拐角与多功能支架上, 安装好螺丝需用尖嘴钳紧固,达到稳定结构效果
2.2.6.2.14. 6、安装机器人手臂舵机#
取安装好的机器人左右手臂结构各1 个、伺服舵机2 个、圆头M3x10 螺丝2 个,圆头M4x8 螺丝8 个、M4 螺母8 个。首先如图所示,将M3x10 螺丝由多功能支架内部向外穿出安装,该螺丝用于后面安装法兰轴承,所以在安装舵机前必须先把该螺丝位置安装好,注意:M3x10 螺丝的安装位置,必须在多功能支架的内侧正中间孔位,保持与舵机的伸出轴承在一条水平线上。安装舵机,用M4x8 螺丝和M4 螺母分别固定舵机的4 个拐角与多功能支架上,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
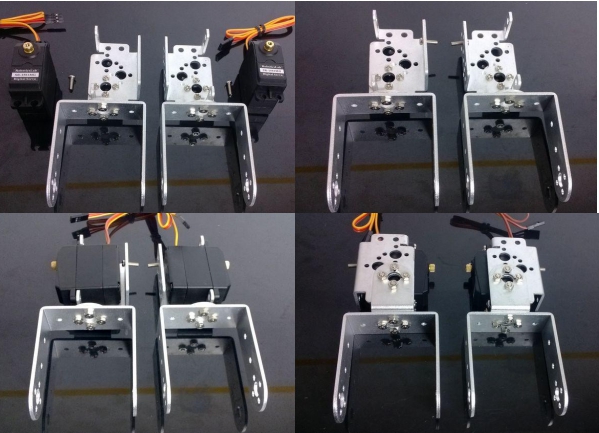
2.2.6.2.15. 7、安装机器人手腕舵机#

取安装好的机器人左右手腕结构各1 个、伺服舵机2 个、圆头M3x10 螺丝2 个,圆头M4x8 螺丝8 个、M4 螺母8 个。首先如图所示,将M3x10 螺丝由多功能支架内部向外穿出安装,该螺丝用于后面安装法兰轴承,所以在安装舵机前必须先把该螺丝位置安装好, 注意:M3x10 螺丝的安装位置,必须在多功能支架的内侧正中间孔位,保持与舵机的伸出轴承在一条水平线上。安装舵机,用M4x8 螺丝和M4 螺母分别固定舵机的4 个拐角与多功能支架上,安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.3. 四、连接机械人各部分#
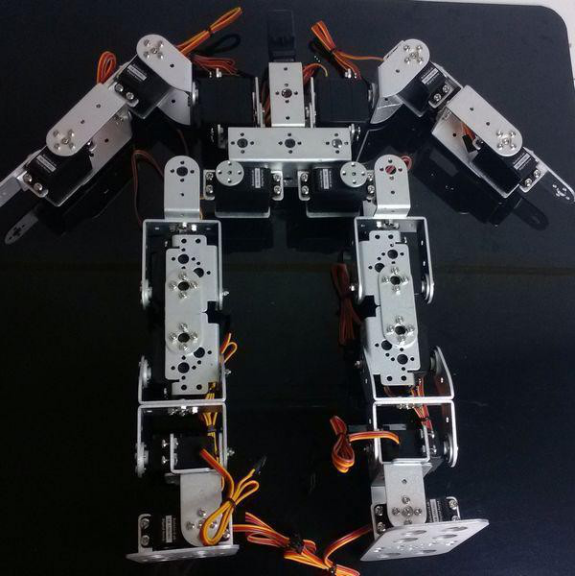
经过前面几个步骤,机械人的各部分均已安装好,剩下的工作是怎么将各部分结构连接起来,组装一个完整的身体。如下图所示,先将机器人各部分结构大致排列好,便于自己 整体上了解各部分所在位置,连接时候不至于拿错安装错位。需注意的是:机器人左右对称 的结构部分虽然看起来一样,实际是不一样的(因为安装螺丝位置不一样),所以安装的时候不能通用,左边的结构不能用于右边安装,切记!
• 
2.2.6.3.1. 1、连接机器人脚掌与脚踝#
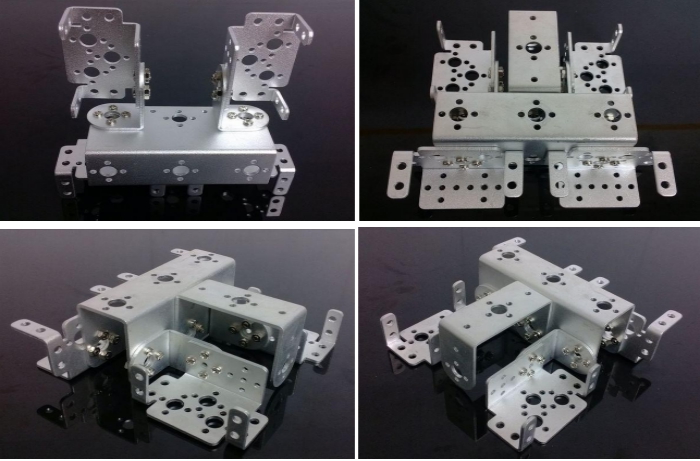
取安装好的机器人脚掌、脚踝结构各1 个、金属舵盘4 个、圆头M3x5 螺丝8 个、圆头M3x6 螺丝2 个、M3 螺母2 个、法兰轴承2 个,如图所示安装。首先,将金属舵盘竖直安装在舵机上(注意:舵机默认发货默认角度是中间值,如果不小心旋动舵机,导致目前舵机输出角度不详,需用软件再调整到中间值1500 角度,安装金属舵盘时候一定要保证舵盘的四孔水平和竖直,不能歪斜着安装上);然后,将两个结构套在一起,正面金属舵盘处四周用4 个圆头M3x5 螺丝固定,中间孔用1 个圆头M3x6 螺丝固定。背面虚轴处, 用一个法兰轴承安装上,再用M3 螺母旋紧固定住。安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.3.2. 2、连接机器人小腿与大腿#
• 取安装好的机器人大腿结构、小腿结构和胯部关节各1 个、金属舵盘4 个、圆头M3x5螺丝16 个、圆头M3x6 螺丝4 个、M3 螺母4 个、法兰轴承4 个,如图所示安装。首先,将金属舵盘竖直安装在舵机上(注意:舵机默认发货默认角度是中间值,如果不小心旋动舵机,导致目前舵机输出角度不详,需用软件再调整到中间值1500 角度,安装金属舵盘时候一定要保证舵盘的四孔水平和竖直,不能歪斜着安装上);然后,将两个结构套在一起,正面金属舵盘处四周用4 个圆头M3x5 螺丝固定,中间孔用1 个圆头M3x6 螺丝固定。背面虚轴处,用一个法兰轴承安装上,再用M3 螺母旋紧固定住。安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.3.3. 3、连接机器人双腿#
取前面两步安装好的机器人下身机构、圆头M3x5 螺丝8 个、圆头M3x6 螺丝2 个、M3 螺母2 个、法兰轴承2 个,如图所示安装。将已经安装好的两个结构套在一起,正面金属舵盘处四周用4 个圆头M3x5 螺丝固定,中间孔用1 个圆头M3x6 螺丝固定。背面虚轴处,用一个法兰轴承安装上,再用M3 螺母旋紧固定住。安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.3.4. 4、连接机器人胳膊#
•取安装好的机器人手臂结构和手腕结构各1 个、金属舵盘4 个、圆头M3x5 螺丝8 个、圆头M3x6 螺丝2 个、M3 螺母2 个、法兰轴承2 个,如图所示安装。首先,将金属舵盘竖直安装在舵机上(注意:舵机默认发货默认角度是中间值,如果不小心旋动舵机,导致目前舵机输出角度不详,需用软件再调整到中间值1500 角度,安装金属舵盘时候一定要保证舵盘的四孔水平和竖直,不能歪斜着安装上);然后,将两个结构套在一起,正面金属舵盘处四周用4 个圆头M3x5 螺丝固定,中间孔用1 个 圆头M3x6 螺丝固定。背面虚轴处,用一个法兰轴承安装上,再用M3 螺母旋紧固定住。安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
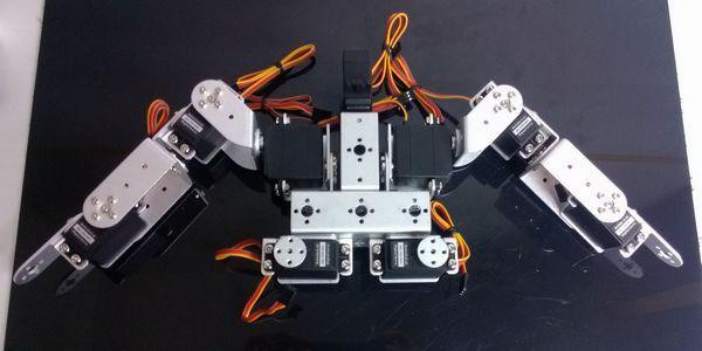
2.2.6.3.5. 5、连接机器人肩部和头部#
取安装好的机器人躯干1 个、斜U 支架2 个、舵机1 个、金属舵盘5 个、圆头M3x5 螺丝12 个、圆头M3x6 螺丝3 个,如图所示安装。首先,将金属舵盘竖直安装在舵机上(注意:舵机默认发货默认角度是中间值,如果不小心旋动舵机,导致目前舵机输出角度不详,需用软件再调整到中间值1500 角度,安装金属舵盘时候一定要保证舵盘的四孔水平和竖直,不能歪斜着安装上);其次,将1 个金属舵盘反面固定在躯干的顶部;然后,将两个斜U 型支架分别固定于机器人躯干的左右肩部,1 个舵机固定于机器人躯干的颈部,正面金属舵盘处四周用4 个圆头M3x5 螺丝固定,中间孔用1 个圆头M3x6 螺丝固定。
2.2.6.3.6. 6、连接机器人上半身#

取前面两步安装好的机器人胳膊结构和躯干结构各1 个、圆头M3x5 螺丝8 个、圆头M3x6 螺丝2 个、M3 螺母2 个、法兰轴承2 个, 如图所示安装。将已经安装好的两个结构套 在一起,正面金属舵盘处四周用4 个圆头M3x5 螺丝固定,中间孔用1 个圆头M3x6 螺丝固定。背面虚轴处,用一个法兰轴承安装上,再用M3 螺母旋紧固定住。安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.3.7. 7、连接机器人下半身#
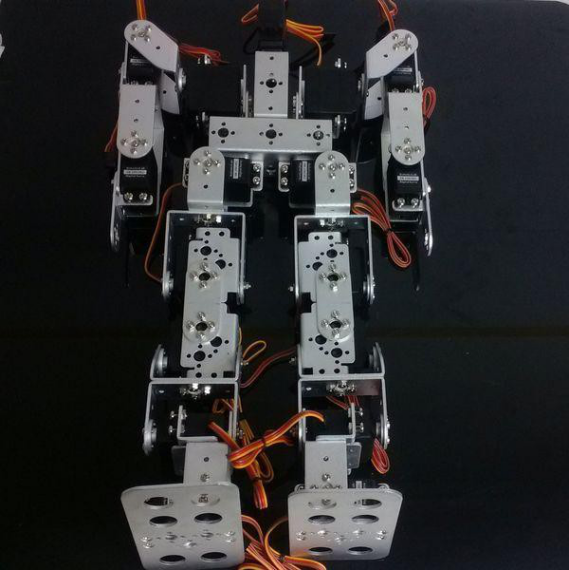
取前面两步安装好的机器人上半身结构和双腿结构各1 个、圆头M3x5 螺丝8 个、圆头M3x6 螺丝2 个、M3 螺母2 个、法兰轴承2 个,如图所示安装。将已经安装好的两个结构套在一起,正面金属舵盘处四周用4 个圆头M3x5 螺丝固定,中间孔用1 个圆头M3x6 螺丝固定。背面虚轴处,用一个法兰轴承安装上,再用M3 螺母旋紧固定住。安装好螺丝需用尖嘴钳紧固,达到稳定结构效果。
2.2.6.4. 更多资源,请关注公众号!#
