1.8.1. 4WD 96mm麦克纳姆轮小车#
1.8.1.1. 1. 简介#
备注:所有车型的小车面板已经更新为没有折弯的。都是平直的面板。
该小车采用铝合金底盘,具有全方位运动、速度快、载重大等特点,支持arduino、51、STM32、Raspberry pie开发板,可以使用WiFi、蓝牙、PS2手柄三种控制方式,非常适用DIY、ROS和飘移研究
1.8.1.2. 2. 安装说明#
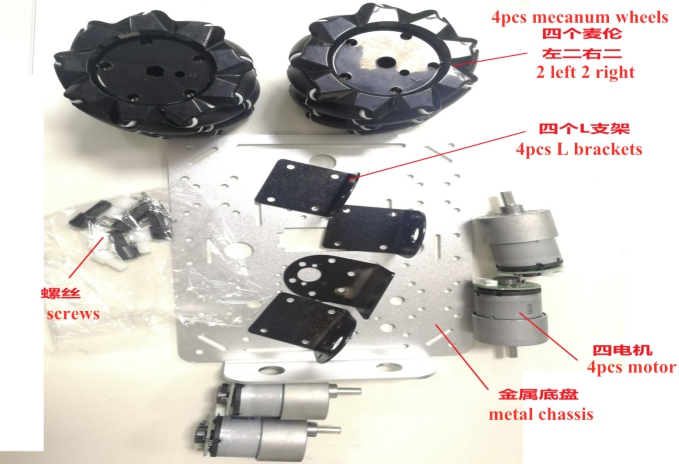
1.8.1.2.1. 2.1 发货清单#
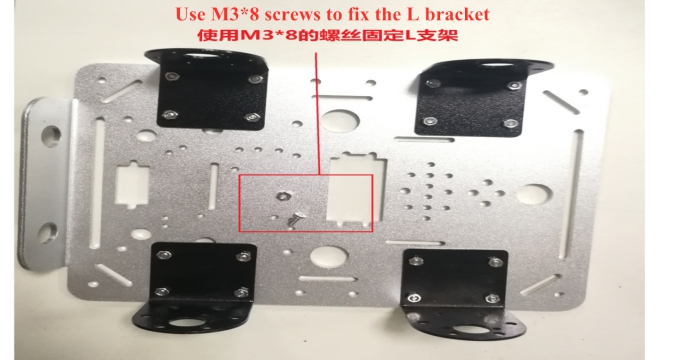
1.8.1.2.2. 2.2 安装电机固定支架#
取出M3*8和M3螺母各16颗,按下图所示方式将 支架固定在底盘上
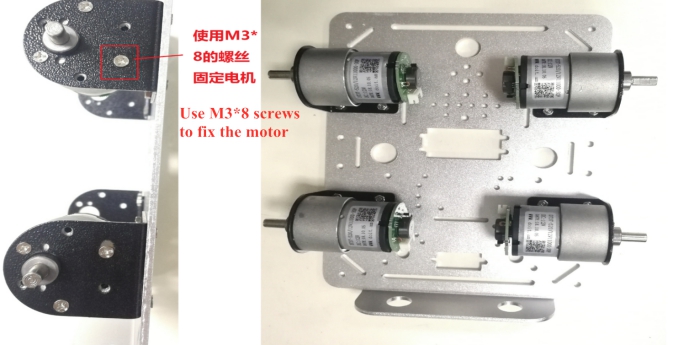
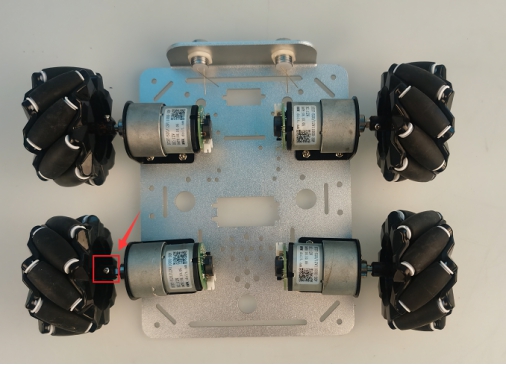
1.8.1.2.3. 2.3 固定电机#
取出12颗M3*8螺丝,按下图所示方式将电机固定在支架上
1.8.1.2.4. 2.4 安装麦克纳轮#
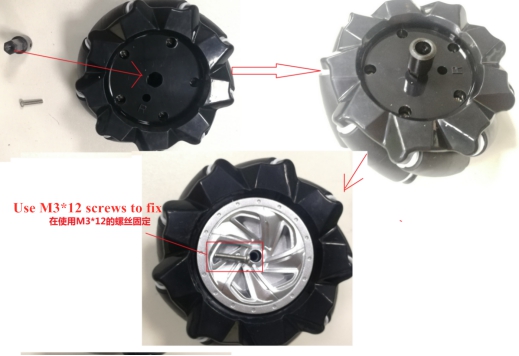
注意:固定电机的螺丝方向要对准电机轴平整那面
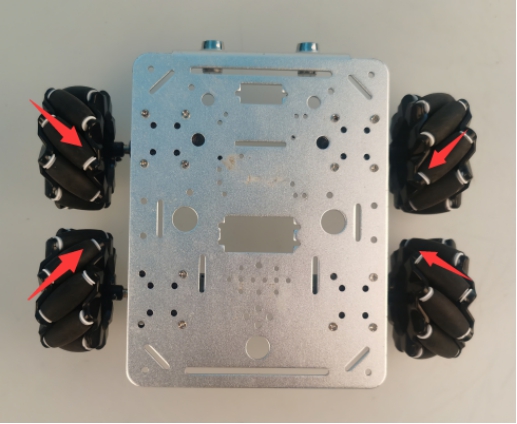
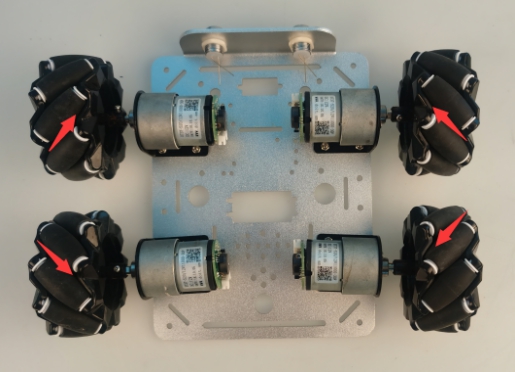
1.8.1.2.5. 2.5 注意要点#
由于麦轮可以全方位的转动,所以要指定安装方向,具体如下图所示
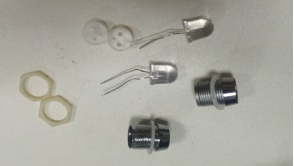
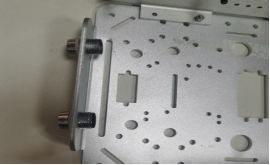
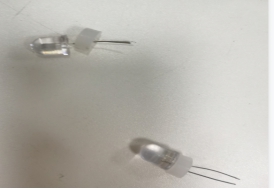
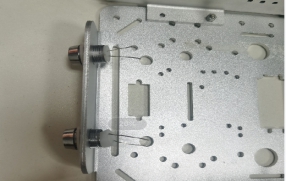
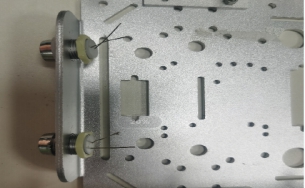
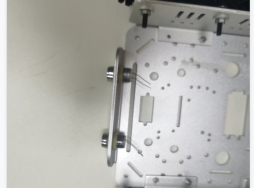
1.8.1.2.6. 2.6 安装LED灯#
1.8.1.3. 3. 源码#
如果编译程序的时候报错显示找不到库文件,请下载对应库文件解压到Arduino IDE安装目录下的libraries文件夹下:https://github.com/SmartArduino/Arduino-Third-party-Libraries
1.8.1.3.1. 3.1 WiFi/Bluetooth#
APP控制软件(仅支持Android手机):https://github.com/SmartArduino/SmartArduino.github.io/blob/master/docs/Robot/Controller/app/base.apk
源程序下载:https://github.com/SmartArduino/Arduino-Code/blob/master/McNameeWheelCar.rar
特殊说明:WiFi和蓝牙共用一个程序
//材料:UNO+Doit电机驱动板+蓝牙模块
/****************************IO引脚定义*****************************/
//电机引脚
#define PWMD 3 //D电机转速
#define DIRD 2 //D电机转向
#define PWMC 5 //C电机转速
#define DIRC 4 //C电机转向
#define PWMB 6 //B电机转速
#define DIRB 7 //B电机转向
#define PWMA 9 //A电机转速
#define DIRA 8 //A电机转向
//控制电机运动 宏定义
// #define MOTOR_GO_FORWARD {digitalWrite(DIRA,HIGH);analogWrite(PWMA,200);digitalWrite(DIRB,LOW);analogWrite(PWMB,200);digitalWrite(DIRC,HIGH);analogWrite(PWMC,200);digitalWrite(DIRD,LOW);analogWrite(PWMD,200);} //车体前进
// #define MOTOR_GO_BACK {digitalWrite(DIRA,LOW);analogWrite(PWMA,200);digitalWrite(DIRB,HIGH);analogWrite(PWMB,200);digitalWrite(DIRC,LOW);analogWrite(PWMC,200);digitalWrite(DIRD,HIGH);analogWrite(PWMD,200);} //车体后退
// #define MOTOR_GO_LEFT {digitalWrite(DIRD,LOW);analogWrite(PWMD,255);digitalWrite(DIRB,LOW);analogWrite(PWMB,255);digitalWrite(DIRA,LOW);analogWrite(PWMA,255);digitalWrite(DIRC,LOW);analogWrite(PWMC,255);} //车体左转
// #define MOTOR_GO_RIGHT {digitalWrite(DIRA,HIGH);analogWrite(PWMA,255);digitalWrite(DIRC,HIGH);analogWrite(PWMC,255);digitalWrite(DIRD,HIGH);analogWrite(PWMD,255);digitalWrite(DIRB,HIGH);analogWrite(PWMB,255);} //车体右转
// #define MOTOR_GO_STOP {digitalWrite(DIRA,LOW);analogWrite(PWMA,0);digitalWrite(DIRB,LOW);analogWrite(PWMB,0);digitalWrite(DIRC,HIGH);analogWrite(PWMC,0);digitalWrite(DIRD,LOW);analogWrite(PWMD,0);} //车体静止
//车体前进
void motor_go_forward()
{
digitalWrite(DIRA,HIGH);
digitalWrite(DIRB,HIGH);
digitalWrite(DIRC,LOW);
digitalWrite(DIRD,LOW);
analogWrite(PWMA,255);
analogWrite(PWMB,255);
analogWrite(PWMC,255);
analogWrite(PWMD,255);
}
//车体前进后退
void motor_go_back()
{
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,LOW);
digitalWrite(DIRC,HIGH);
digitalWrite(DIRD,HIGH);
analogWrite(PWMA,255);
analogWrite(PWMB,255);
analogWrite(PWMC,255);
analogWrite(PWMD,255);
}
//车体左转
void motor_go_left()
{
digitalWrite(DIRA,HIGH);
digitalWrite(DIRB,LOW);
digitalWrite(DIRC,LOW);
digitalWrite(DIRD,HIGH);
analogWrite(PWMA,255);
analogWrite(PWMB,255);
analogWrite(PWMC,255);
analogWrite(PWMD,255);
}
//车体右转
void motor_go_right()
{
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,HIGH);
digitalWrite(DIRC,HIGH);
digitalWrite(DIRD,LOW);
analogWrite(PWMA,255);
analogWrite(PWMB,255);
analogWrite(PWMC,255);
analogWrite(PWMD,255);
}
//车体停止
void motor_go_stop()
{
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,LOW);
digitalWrite(DIRC,LOW);
digitalWrite(DIRD,LOW);
analogWrite(PWMA,0);
analogWrite(PWMB,0);
analogWrite(PWMC,0);
analogWrite(PWMD,0);
}
//车体左平移
//
void motor_pmove_left()
{
digitalWrite(DIRA,HIGH);
digitalWrite(DIRB,LOW);
digitalWrite(DIRC,HIGH);
digitalWrite(DIRD,LOW);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
analogWrite(PWMC,200);
analogWrite(PWMD,200);
}
//车体右平移
void motor_pmove_right()
{
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,HIGH);
digitalWrite(DIRC,LOW);
digitalWrite(DIRD,HIGH);
analogWrite(PWMA,200);
analogWrite(PWMB,200);
analogWrite(PWMC,200);
analogWrite(PWMD,200);
}
//串口接收处理
#define MAX_PACKETSIZE 32 //串口接收缓冲区
char buffUART[MAX_PACKETSIZE];
unsigned int buffUARTIndex = 0;
unsigned long preUARTTick = 0;
//小车转向
enum DN
{
GO_ADVANCE,
GO_LEFT,
GO_RIGHT,
GO_BACK,
STOP_STOP,
PMOVE_LEFT,//Parallel movement to the left
PMOVE_RIGHT,//Parallel movement to the right
DEF
} Drive_Num = DEF;
//电机控制标志量
bool flag1 = false;
bool stopFlag = true;
bool JogFlag = false;
uint16_t JogTimeCnt = 0;
uint32_t JogTime = 0;
//小车电机控制
void CAR_Control()
{
switch (Drive_Num)
{
case GO_ADVANCE:motor_go_forward(); JogFlag = true; JogTimeCnt = 1; JogTime = millis(); break;
case GO_LEFT: motor_go_left(); JogFlag = true; JogTimeCnt = 1; JogTime = millis(); break;
case GO_RIGHT: motor_go_right(); JogFlag = true; JogTimeCnt = 1; JogTime = millis(); break;
case GO_BACK: motor_go_back(); JogFlag = true; JogTimeCnt = 1; JogTime = millis(); break;
case STOP_STOP: motor_go_stop(); JogTime = 0; JogFlag = false; stopFlag = true; break;
case PMOVE_LEFT: motor_pmove_left(); JogFlag = true; JogTimeCnt = 1; JogTime = millis(); break;
case PMOVE_RIGHT: motor_pmove_right(); JogFlag = true; JogTimeCnt = 1; JogTime = millis(); break;
default: break;
}
Drive_Num = DEF;
//小车保持姿态210ms
if (millis() - JogTime >= 210)
{
JogTime = millis();
if (JogFlag == true)
{
stopFlag = false;
if (JogTimeCnt <= 0)
{
JogFlag = false; stopFlag = true;
}
JogTimeCnt--;
}
if (stopFlag == true)
{
JogTimeCnt = 0;
motor_go_stop();
}
}
}
//串口数据接收处理
void UART_Control()
{
char Uart_Date = 0;
if (Serial.available()) //串口收到数据
{
Uart_Date = Serial.read();
}
if (buffUARTIndex > 0 && (millis() - preUARTTick >= 100)) //超过100ms没接到数据,则认为已经接收到完整指令
{ //data ready
buffUART[buffUARTIndex] = 0x00;
if ((buffUART[0] == 'C') && (buffUART[1] == 'M') && (buffUART[2] == 'D')) //若发送指令非法,则忽略
{
;
}
else Uart_Date = buffUART[0];
buffUARTIndex = 0;
}
switch (Uart_Date) //串口控制指令
{
case '2': Drive_Num = GO_ADVANCE; break;
case '4': Drive_Num = GO_LEFT; break;
case '6': Drive_Num = GO_RIGHT; break;
case '8': Drive_Num = GO_BACK; break;
case '5': Drive_Num = STOP_STOP; break;
case 'Y': Drive_Num = PMOVE_LEFT; break;
case 'y': Drive_Num = PMOVE_RIGHT;break;
default: break;
}
}
//IO初始化
void IO_init()
{
pinMode(DIRA, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(DIRB, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(DIRC, OUTPUT);
pinMode(PWMC, OUTPUT);
pinMode(DIRD, OUTPUT);
pinMode(PWMD, OUTPUT);
motor_go_stop();
}
/////////////////////////////////////////////////////////////////////////////
void setup()
{
Serial.begin(9600);
IO_init();
}
void loop()
{
UART_Control();//串口接收处理
CAR_Control();//小车控制
}
1.8.1.3.2. 3.2 PS2手柄程序#
#include <PS2X_lib.h> //for v1.6
/******************************************************************
* set pins connected to PS2 controller:
* - 1e column: original
* - 2e colmun: Stef?
* replace pin numbers by the ones you use
******************************************************************/
//PS2手柄引脚;
#define PS2_DAT 13
#define PS2_CMD 11
#define PS2_SEL 10
#define PS2_CLK 12
// 电机控制引脚;
#define PWMD 3
#define DIRD 2
#define PWMC 5
#define DIRC 4
#define PWMB 6
#define DIRB 7
#define PWMA 9
#define DIRA 8
char speed = 100; //小车速度
enum DN
{
GO_FORWARD,
GO_BACK,
GO_LEFT,
GO_RIGHT,
GO_PLEFT,
GO_PRIGHT,
GO_STOP,
DEF
}Drive_Num = DEF;
/******************************************************************
* select modes of PS2 controller:
* - pressures = analog reading of push-butttons
* - rumble = motor rumbling
* uncomment 1 of the lines for each mode selection
******************************************************************/
// #define pressures true
#define pressures false
// #define rumble true
#define rumble false
PS2X ps2x; // create PS2 Controller Class
//right now, the library does NOT support hot pluggable controllers, meaning
//you must always either restart your Arduino after you connect the controller,
//or call config_gamepad(pins) again after connecting the controller.
int error = 0;
byte type = 0;
byte vibrate = 0;
void (* resetFunc) (void) = 0;
//初始化
void setup() {
pinMode(PWMA, OUTPUT);
pinMode(DIRA, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(DIRB, OUTPUT);
pinMode(PWMC, OUTPUT);
pinMode(DIRC, OUTPUT);
pinMode(PWMD, OUTPUT);
pinMode(DIRD, OUTPUT);
Serial.begin(9600);
delay(300) ; //added delay to give wireless ps2 module some time to startup, before configuring it
//CHANGES for v1.6 HERE!!! **************PAY ATTENTION*************
//setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error
error = ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble);
if (error == 0) {
Serial.print("Found Controller, configured successful ");
Serial.print("pressures = ");
if (pressures)
Serial.println("true ");
else
Serial.println("false");
Serial.print("rumble = ");
if (rumble)
Serial.println("true)");
else
Serial.println("false");
Serial.println("Try out all the buttons, X will vibrate the controller, faster as you press harder;");
Serial.println("holding L1 or R1 will print out the analog stick values.");
Serial.println("Note: Go to www.billporter.info for updates and to report bugs.");
}
else if (error == 1)
{
Serial.println("No controller found, check wiring, see readme.txt to enable debug. visit www.billporter.info for troubleshooting tips");
resetFunc();
}
else if (error == 2)
Serial.println("Controller found but not accepting commands. see readme.txt to enable debug. Visit www.billporter.info for troubleshooting tips");
else if (error == 3)
Serial.println("Controller refusing to enter Pressures mode, may not support it. ");
// Serial.print(ps2x.Analog(1), HEX);
type = ps2x.readType();
switch (type) {
case 0:
Serial.print("Unknown Controller type found ");
break;
case 1:
Serial.print("DualShock Controller found ");
break;
case 2:
Serial.print("GuitarHero Controller found ");
break;
case 3:
Serial.print("Wireless Sony DualShock Controller found ");
break;
}
}
//小车运动定义
void turnLeft(int speed) { //小车左转
digitalWrite(DIRA,HIGH);
digitalWrite(DIRB,LOW);
digitalWrite(DIRC,LOW);
digitalWrite(DIRD,HIGH);
analogWrite(PWMA, speed);
analogWrite(PWMB, speed);
analogWrite(PWMC, speed);
analogWrite(PWMD, speed);
}
void turnRight(int speed) { //小车右转
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,HIGH);
digitalWrite(DIRC,HIGH);
digitalWrite(DIRD,LOW);
analogWrite(PWMA, speed);
analogWrite(PWMB, speed);
analogWrite(PWMC, speed);
analogWrite(PWMD, speed);
}
void forward(int speed) { //小车前进
digitalWrite(DIRA, HIGH);
digitalWrite(DIRB, HIGH);
digitalWrite(DIRC, LOW);
digitalWrite(DIRD, LOW);
analogWrite(PWMA, speed);
analogWrite(PWMB, speed);
analogWrite(PWMC, speed);
analogWrite(PWMD, speed);
}
void back(int speed) { //小车后退
digitalWrite(DIRA, LOW);
digitalWrite(DIRB, LOW);
digitalWrite(DIRC, HIGH);
digitalWrite(DIRD, HIGH);
analogWrite(PWMA, speed);
analogWrite(PWMB, speed);
analogWrite(PWMC, speed);
analogWrite(PWMD, speed);
}
void stop() // 停止;
{
digitalWrite(DIRA, LOW);
digitalWrite(DIRB, LOW);
digitalWrite(DIRC, LOW);
digitalWrite(DIRD, LOW);
analogWrite(PWMA, 0);
analogWrite(PWMB, 0);
analogWrite(PWMC, 0);
analogWrite(PWMD, 0);
}
//车体左平移
//
void motor_pmove_left(int speed)
{
digitalWrite(DIRA,HIGH);
digitalWrite(DIRB,LOW);
digitalWrite(DIRC,HIGH);
digitalWrite(DIRD,LOW);
analogWrite(PWMA,speed);
analogWrite(PWMB,speed);
analogWrite(PWMC,speed);
analogWrite(PWMD,speed);
}
//车体右平移
void motor_pmove_right(int speed)
{
digitalWrite(DIRA,LOW);
digitalWrite(DIRB,HIGH);
digitalWrite(DIRC,LOW);
digitalWrite(DIRD,HIGH);
analogWrite(PWMA,speed);
analogWrite(PWMB,speed);
analogWrite(PWMC,speed);
analogWrite(PWMD,speed);
}
void loop()
{
PS2();
Control();
}
void PS2()
{
/* You must Read Gamepad to get new values and set vibration values
ps2x.read_gamepad(small motor on/off, larger motor strenght from 0-255)
if you don't enable the rumble, use ps2x.read_gamepad(); with no values
You should call this at least once a second
*/
if (error == 1) //skip loop if no controller found
return;
if (type == 2) { //Guitar Hero Controller
return;
}
else { //DualShock Controller
ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' speed
// 电机正转;
if (ps2x.Button(PSB_PAD_UP)) {
Serial.println("Up held this hard: ");
Drive_Num = GO_FORWARD;
}
// 电机反转;
else if (ps2x.Button(PSB_PAD_DOWN)) {
Serial.print("Down held this hard: ");
Drive_Num = GO_BACK;
}
//左转;
else if (ps2x.Button(PSB_PAD_LEFT)) {
Serial.println("turn left ");
Drive_Num = GO_LEFT;
}
//右转;
else if (ps2x.Button(PSB_PAD_RIGHT)) {
Serial.println("turn right");
Drive_Num = GO_RIGHT;
}
// 左平移
else if (ps2x.Button(PSB_PINK)) {
Serial.println("motor_pmove_left");
Drive_Num = GO_PLEFT;
}
// 右平移
else if (ps2x.Button(PSB_RED)) {
Serial.println("motor_pmove_right");
Drive_Num = GO_PRIGHT;
}
// Stop
else
{
Drive_Num = GO_STOP;
}
delay(20);
}
if (ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) { //print stick values if either is TRUE
Serial.print("Stick Values:");
Serial.print(ps2x.Analog(PSS_LY), DEC); //Left stick, Y axis. Other options: LX, RY, RX
Serial.print(",");
Serial.print(ps2x.Analog(PSS_LX), DEC);
Serial.print(",");
Serial.print(ps2x.Analog(PSS_RY), DEC);
Serial.print(",");
Serial.println(ps2x.Analog(PSS_RX), DEC);
int LY = ps2x.Analog(PSS_LY);
int LX = ps2x.Analog(PSS_LX);
int RY = ps2x.Analog(PSS_RY);
int RX = ps2x.Analog(PSS_RX);
if (LY < 127) //前进
{
speed = 1.5 * (127 - LY);
forward(speed);
delay(20);
}
//后退
if (LY > 127)
{
speed = 1.5 * (LY - 128);
back(speed);
delay(20);
}
//左转
if (LX < 128)
{
speed = 1.5 * (127 - LX);
turnLeft(speed);
delay(20);
}
//右转
if (LX > 128)
{
speed = 1.5 * (LX - 128);
turnRight(speed);
delay(20);
}
//如果摇杆居中
if (LY >= 128 && LY <= 128 && LX >= 128 && LX <= 128)
{
stop();
delay(20);
}
}
}
void Control()
{
switch(Drive_Num)
{
case GO_FORWARD: forward(speed); break;
case GO_BACK: back(speed); break;
case GO_LEFT: turnLeft(speed); break;
case GO_RIGHT: turnRight(speed); break;
case GO_PLEFT: motor_pmove_left(speed); break;
case GO_PRIGHT: motor_pmove_right(speed); break;
case GO_STOP: stop(); break;
default: break;
}
}
1.8.1.4. 4. 控制说明#
有关详细信息,请参阅本文:https://gitnova.com/#/zh/zhControlPanel/4&&16ControlKit/4&&16ControlKit 第五节 操作说明部分 以及第六节 注意事项
1.8.1.5. 更多资源,请关注公众号!#
