4.17. Arduino传感器认识与应用#
4.17.1. 1. 按钮开关#
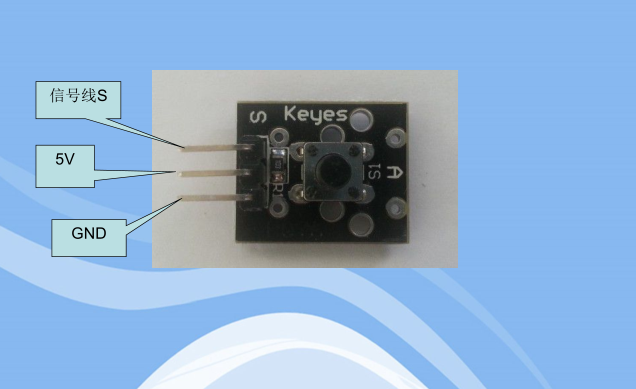
int Led=13; //定义LED 接口
int buttonpin=3; //定义按键开关传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义按键开关传感器为输入接口
}
void loop()
{
val=digitalRead(buttonpin);//将数字接口3的值读取赋给val
if(val==HIGH) //当按键开关传感器检测有信号时,LED 闪烁
{
digitalWrite(Led,HIGH)
}
else
{
digitalWrite(Led,LOW)
}
}
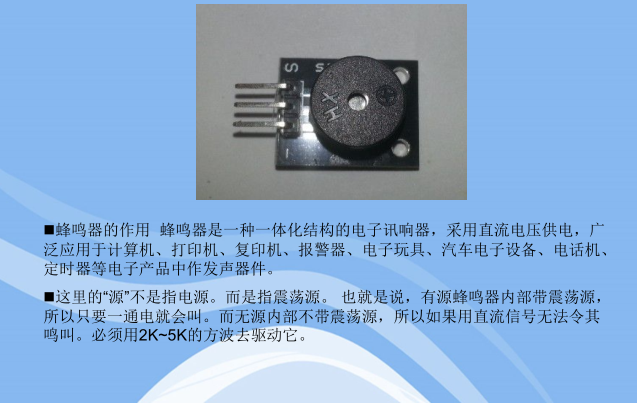
4.17.2. 2. 无源蜂鸣器#
int buzzer=8;//设置控制蜂鸣器的数字IO脚
void setup()
{
pinMode(buzzer,OUTPUT);//设置数字IO脚模式,OUTPUT为输出
}
void loop()
{
unsigned char i,j; //定义变量
for(i=0;i<80;i++) //辒出一个频率的声音
{
digitalWrite(buzzer,HIGH); //发声音
delay(1); //延时1ms
digitalWrite(buzzer,LOW); //不发声音
delay(1); //延时ms
}
for(i=0;i<100;i++) //输出出另一个频率的声音
{
digitalWrite(buzzer,HIGH); //发声音
delay(2); //延时2ms
digitalWrite(buzzer,LOW); //不发声音
delay(2); //延时2ms
}
}
int buzzer=8; //设置控制蜂鸣器的数字IO脚
void setup()
{
pinMode(buzzer,OUTPUT); //设置数字IO脚模式,OUTPUT为辒出
}
void loop()
{
unsigned char i,j; //定义变量
for(i=0;i<100;i++) //输出一个频率的声音
{
digitalWrite(buzzer,HIGH);//发声音
delayMicroseconds(40); // 延时40微秒
digitalWrite(buzzer,LOW); //不发声音
delayMicroseconds(40); //延时40微秒
}
for(i=0;i<250;i++) //辒出另一个频率癿声音
{
digitalWrite(buzzer,HIGH);//发声音
delayMicroseconds(120); //延时120微秒
digitalWrite(buzzer,LOW); //不发声音
delayMicroseconds(120); //延时120微秒
}
}
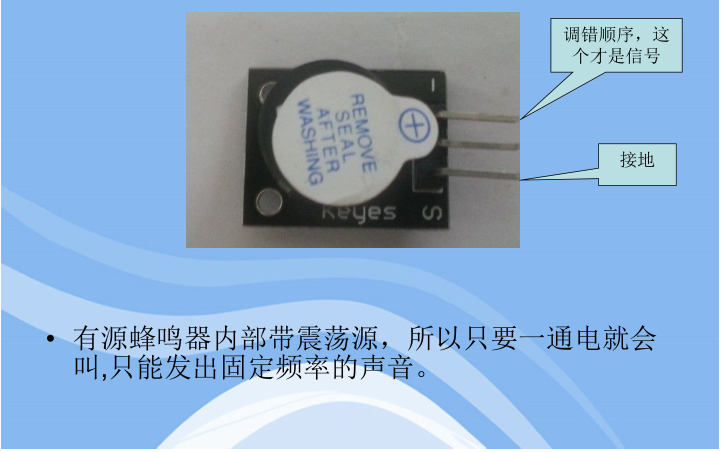
4.17.3. 3. 有源蜂鸣器#
int speakerPin = 8; //控制喇叭的引脚
int value = 10; //控制喇叭响的时间,可自行更改
void setup()
{
pinMode(speakerPin, OUTPUT);
}
void loop()
{
digitalWrite(speakerPin, HIGH);
delay(value); //调节喇叭响的时间;
digitalWrite(speakerPin, LOW);
delay(value); //调节喇叭不响的时间;
}
4.17.4. 4. 激光传感器#

实例程序
void setup()
{
pinMode(13, OUTPUT); // 定义13脚为数字输出接口
}
void loop()
{
digitalWrite(13, HIGH); // 打开激光头
delay(1000); // 延时一秒
digitalWrite(13, LOW); // 关闭激光头
delay(1000); // 延时一秒
}
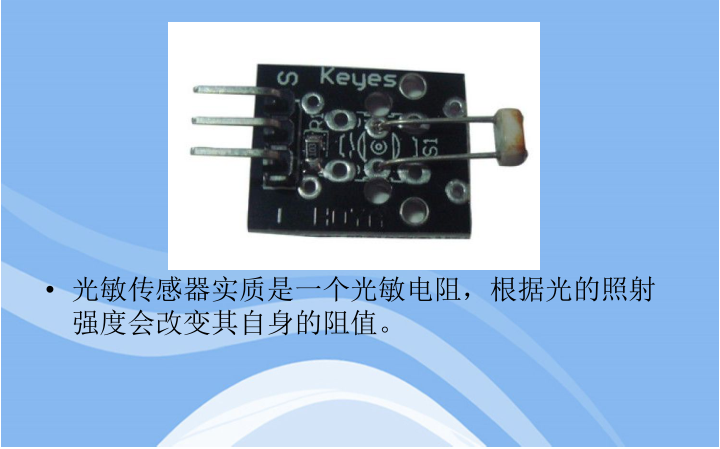
4.17.5. 5. 光明传感器#
int sensorPin = 2;
int value = 0;
void setup()
{
Serial.begin(9600); //串口波特率为9600
}
void loop()
{
value = analogRead(sensorPin); //读取模拟2端口
Serial.println(value, DEC); //十进制数显示结果并且换行
delay(50); //延时50毫秒
}
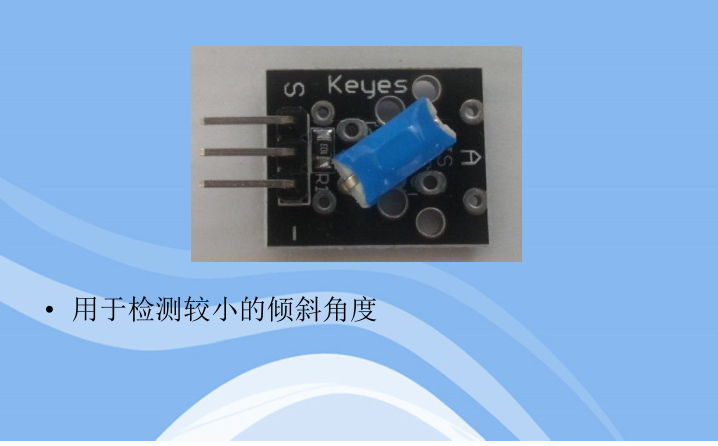
4.17.6. 6. 倾斜开关#
int Led=13; //定义LED 接口
int buttonpin=3; //定义 倾斜开关传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义 倾斜开关传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin); //将数字接口3的值读取赋给val
if(val==HIGH) //当 倾斜开关传感器检测有信号时,LED 亮
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
4.17.7. 7. 水银开关传感器#

int Led=13; //定义LED 接口
int buttonpin=3; //定义 倾斜开关传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义 倾斜开关传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin); //将数字接口3的值读取赋给val
if(val==HIGH) //当 倾斜开关传感器检测有信号时,LED 闪烁
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
4.17.8. 8. 魔术光环(一对)#

int LedPinA = 5;
int LedPinB = 6;
int ButtonPinA = 7;
int ButtonPinB = 4;
int buttonStateA = 0;
int buttonStateB = 0;
int brightness = 0;
void setup()
{
pinMode(LedPinA, OUTPUT);
pinMode(LedPinB, OUTPUT);
pinMode(ButtonPinA, INPUT);
pinMode(ButtonPinB, INPUT);
}
void loop()
{
buttonStateA = digitalRead(ButtonPinA); //读取A模块
if (buttonStateA == HIGH && brightness != 255)
{ //当A模块检测到信号,且亮度不是最大时,亮度值增加
brightness ++;
}
buttonStateB = digitalRead(ButtonPinB);
if (buttonStateB == HIGH && brightness != 0)
{ //当B模块检测到信号,且亮度不是最小时,亮度值减小
brightness --;
}
analogWrite(LedPinA, brightness); // A慢漸暗
analogWrite(LedPinB, 255 - brightness); // B慢漸亮
delay(25);
}
//两者相加的和为255,亮度此消彼涨的关系
4.17.9. 9. 震动开关#

int Led=13; //定义LED 接口
int Shock=3; //定义震动传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(Shock,INPUT); //定义震动传感器为输出接口
}
void loop()
{
val=digitalRead(Shock); //将数字接口3的值读取赋给val
if(val==HIGH) //当震动传感器检测有信号时,LED 闪烁
{
digitalWrite(Led,LOW);
}
else
{
digitalWrite(Led,HIGH);
}
}
4.17.10. 10. 敲击传感器#
int Led=13; //定义LED 接口
int Shock=3; //定义震动传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(Shock,INPUT); //定义震动传感器为输出接口
}
void loop()
{
val=digitalRead(Shock); //将数字接口3的值读取赋给val
if(val==HIGH) //当震动传感器检测有信号时,LED 闪烁
{
digitalWrite(Led,LOW);
}
else
{
digitalWrite(Led,HIGH);
}
}
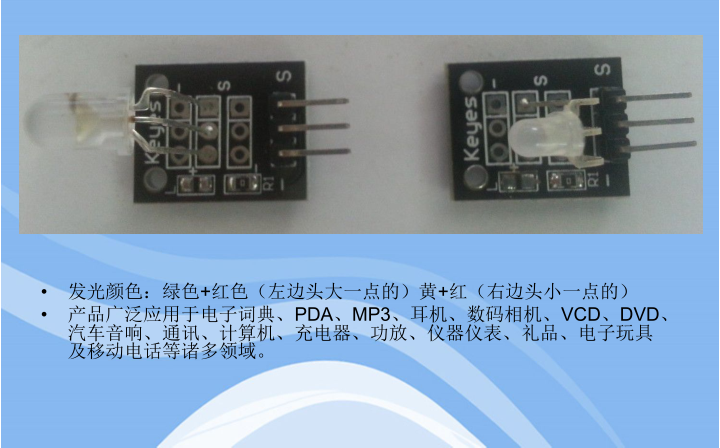
4.17.11. 11. 双色共阴LED模块#
int redpin = 11; // 选择红灯引脚
int greenpin =10; // 选择绿灯引脚
int val;
void setup()
{
pinMode(redpin, OUTPUT);
pinMode(greenpin, OUTPUT);
}
void loop()
{
for(val=255; val>0; val--)
{
analogWrite(redpin, val);
analogWrite(greenpin, 255-val);
delay(15);
}
for(val=0; val<255; val++)
{
analogWrite(redpin, val);
analogWrite(greenpin, 255-val);
delay(15);
}
}
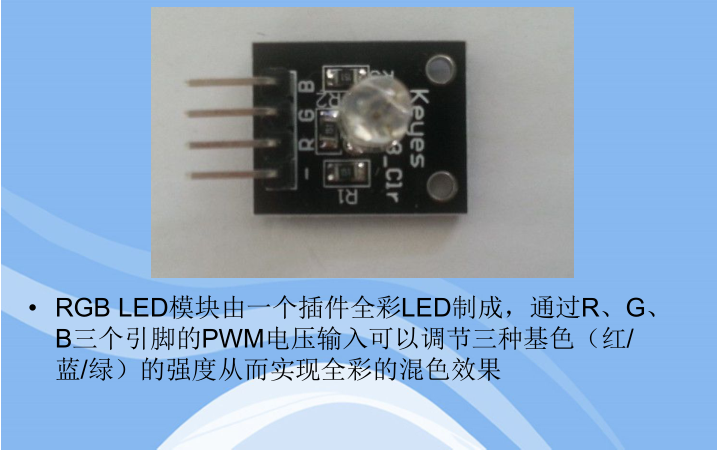
4.17.12. 12. 三色RGB模块(DIP封装)#
int redpin = 11; //select the pin for the red LED
int bluepin =10; // select the pin for the blue LED
int greenpin =9; // select the pin for the green LED
int val;
void setup()
{
pinMode(redpin, OUTPUT);
pinMode(bluepin, OUTPUT);
pinMode(greenpin, OUTPUT);
}
void loop()
{
for(val=255; val>0; val--)
{
analogWrite(redpin, val);
analogWrite(bluepin, 255-val);
analogWrite(greenpin, 128-val);
delay(2);
}
for(val=0; val<255; val++)
{
analogWrite(redpin, val);
analogWrite(bluepin, 255-val);
analogWrite(bluepin, 128-val);
delay(2);
}
}
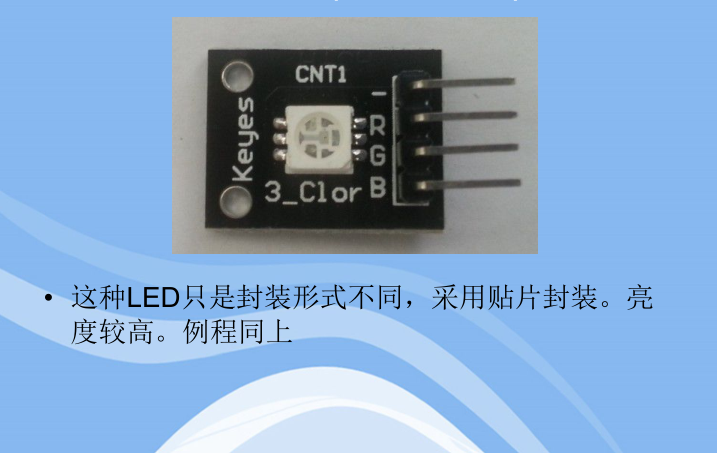
4.17.13. 13. 三色RGB模块(SMD封装)#
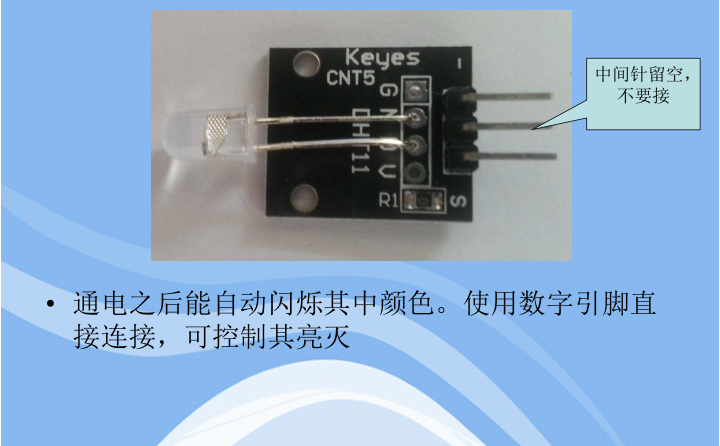
4.17.14. 14. 7彩自动闪烁LED模块#
void setup()
{
pinMode(13, OUTPUT);
}
void loop()
{
digitalWrite(13, HIGH); // set the LED on
delay(8000); // wait for a second
digitalWrite(13, LOW); // set the LED off
delay(1000); // wait for a second
}
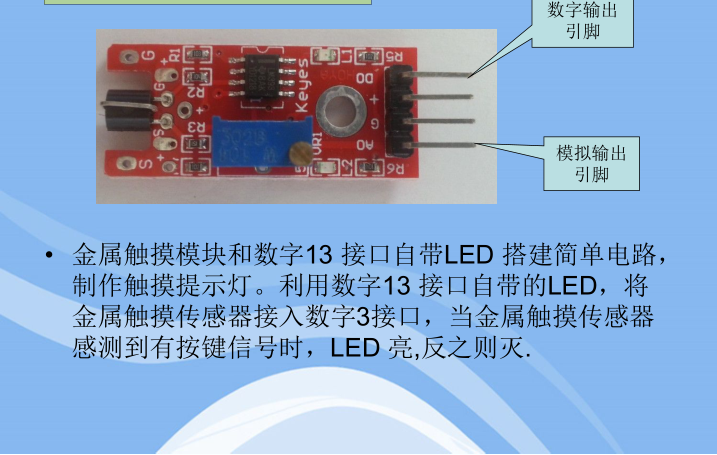
4.17.15. 15. 金属触摸传感器#
int Led=13; //定义LED 接口
int buttonpin=3; //定义金属触摸传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义金属触摸传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin); //将数字接口3的值读取赋给val
if(val==HIGH) //当金属触摸传感器检测有信号时,LED 亮
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
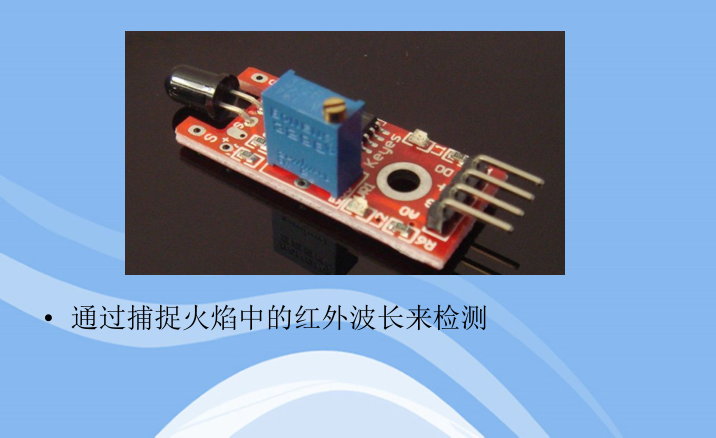
4.17.16. 16. 火焰传感器#
int Led=13; //定义LED 接口
int buttonpin=3; //定义 火焰传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义 火焰传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin); //将数字接口3的值读取赋给val
if(val==HIGH) //当火焰传感器检测有信号时,LED 亮,否则灭
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
4.17.17. 17. 手指测心跳模块#
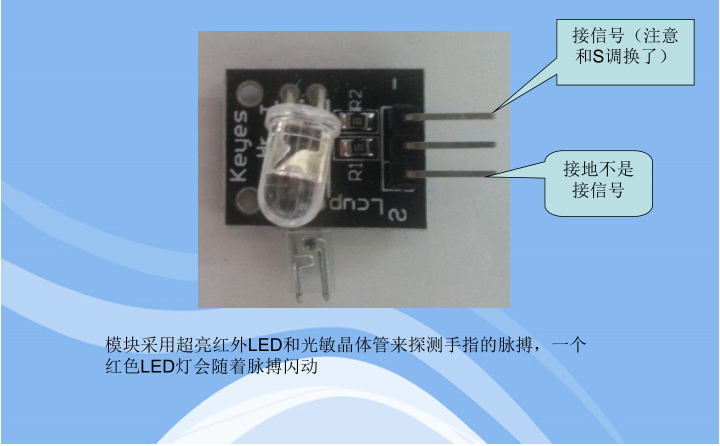
int ledPin=13; //显示灯在13引脚
int sensorPin=0; //传感器引脚在模拟输入第0脚
double alpha=0.75; //修正值,用于增加平滑度
int period=20;
double change=0.0;
void setup()
{
pinMode(ledPin,OUTPUT);
}
void loop()
{
static double oldValue=0;
static double oldChange=0;
int rawValue=analogRead(sensorPin); //读取传感器的值
double value=alpha*oldValue+(1-alpha)*rawValue;
change=value-oldValue;
digitalWrite(ledPin,(change<0.0&&oldChange>0.0)); //输出
oldValue=value;
oldChange=change;
delay(period);
}
4.17.18. 18. 红外避障传感器#
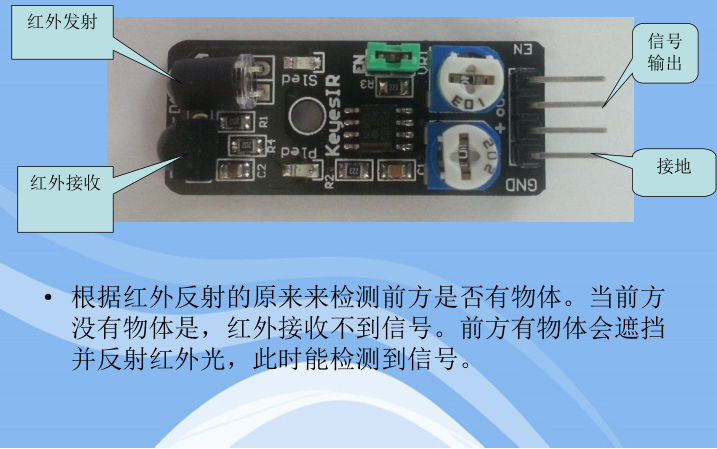
int buttonpin=3; //定义避障传感器接口
int val;//定义数字变量val
void setup()
{
pinMode(Led,OUTPUT);//定义LED 为输出接口
pinMode(buttonpin,INPUT);//定义避障传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin);//将数字接口3的值读取赋给val
if(val==LOW)//当避障传感器检测有障碍物时为低电平
{
digitalWrite(Led,HIGH); //提示有障碍物
}
else
{
digitalWrite(Led,LOW); //没有障碍物
}
}
4.17.19. 19. 寻线传感器#

int Led=13; //定义LED 接口
int buttonpin=3; //定义 寻线传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义 寻线传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin);//将数字接口3的值读取赋给val
if(val==HIGH) //当寻线传感器检测有反射信号时,LED 亮
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
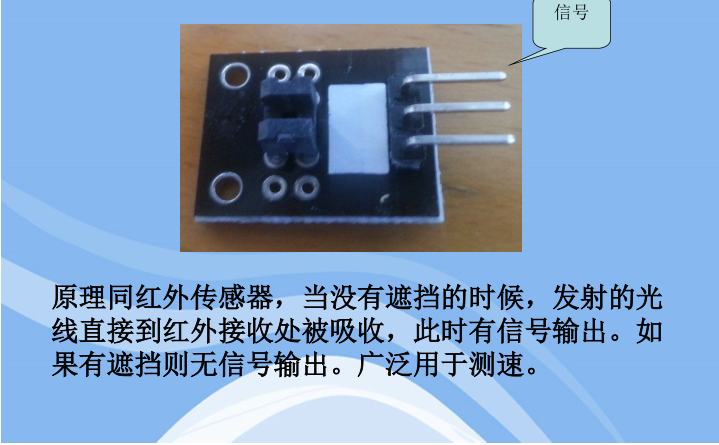
4.17.20. 20. 光折断传感器#
int Led=13; //定义LED 接口
int buttonpin=3; //定义光遮断传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义光遮断传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin); //将数字接口3的值读取赋给val
if(val==HIGH) //当光遮断传感器检测有信号时,LED 亮
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
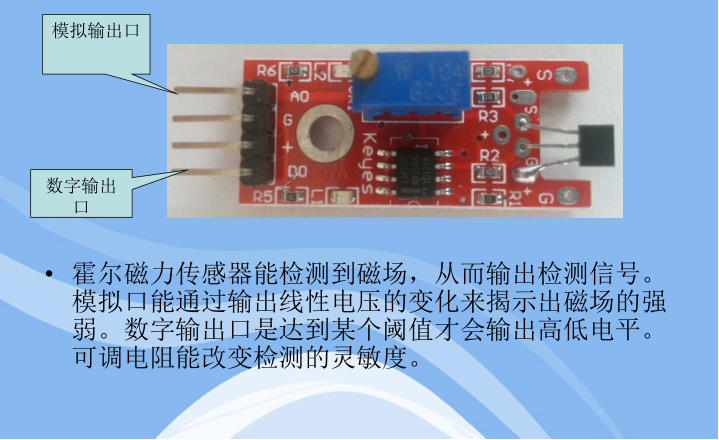
4.17.21. 21. 线性霍尔磁力传感器#
int Led=13; //定义LED 接口
int buttonpin=3; //定义线性霍尔传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义线性霍尔传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin);//将数字接口3的值读取赋给val
if(val==HIGH) //当霍尔传感器检测没有磁场信号时,LED 亮
{
digitalWrite(Led,HIGH);
}
else //当霍尔传感器检测到有磁场信号时,LED灭
{
digitalWrite(Led,LOW);
}
}
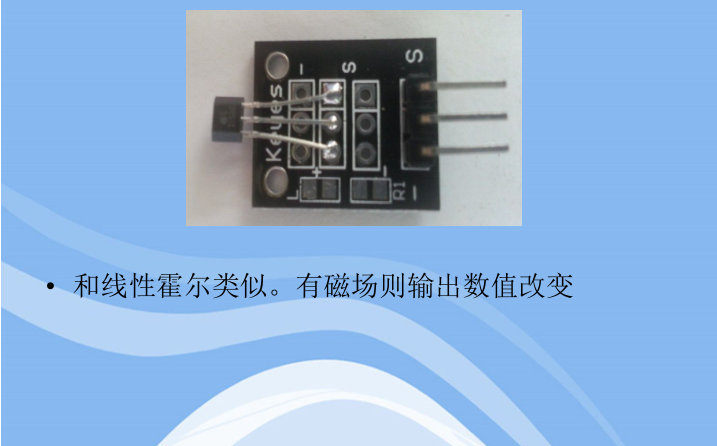
4.17.22. 22. 模拟霍尔传感器#
int sensorPin = 1;
int value = 0;
void setup()
{
Serial.begin(9600); //串口波特率为9600
}
void loop()
{
value = analogRead(sensorPin); //读取模拟1端口
Serial.println(value, DEC); //十进制数显示结果并且换行
delay(50); //延时50毫秒
}
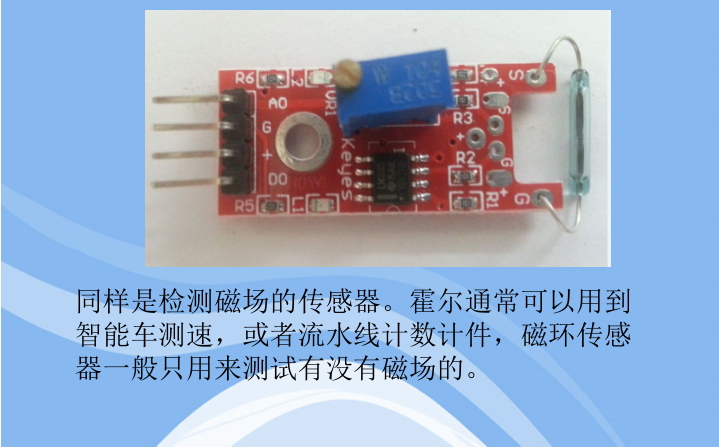
4.17.23. 23. 大磁簧传感器#
int Led=13; //定义LED 接口
int buttonpin=3; //定义 磁环传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义 磁环传感器为输出接口
}
void loop()
{
val=digitalRead(buttonpin); //将数字接口3的值读取赋给val
if(val==HIGH) //当 磁环传感器检测有信号时,LED 亮
{
digitalWrite(Led,HIGH);
}
else //没有信号则灭
{
digitalWrite(Led,LOW);
}
}
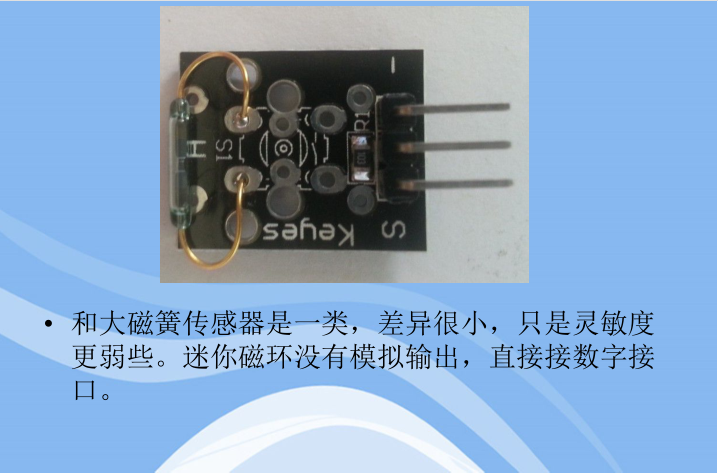
4.17.24. 24. 迷你磁环传感器#
int Led=13; //定义LED 接口
int buttonpin=3; //定义 磁环传感器接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT);//定义 磁环传感器为输入接口
}
void loop()
{
val=digitalRead(buttonpin);//将数字接口3的值读取赋给val
if(val==HIGH) //当 磁环传感器检测有信号时,LED 亮
{
digitalWrite(Led,HIGH);
}
else
{
digitalWrite(Led,LOW);
}
}
4.17.25. 25. 旋转编码器#
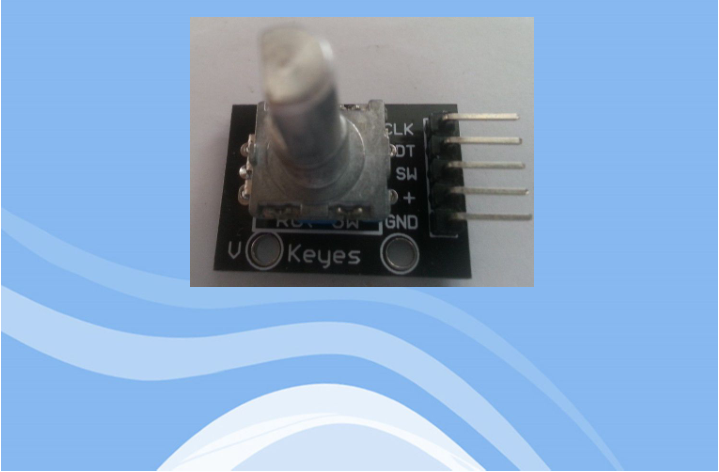
const int interruptA = 0; // 中断 Interrupt 0 在 pin 2 上
int CLK = 2; // PIN2 脉冲信号
int DAT = 3; // PIN3
int SW= 4; // PIN4 往下按压的开关信号
int LED1 = 5; // PIN5
int LED2 = 6; // PIN6
int COUNT = 0;
void setup()
{
attachInterrupt(interruptA, RoteStateChanged, FALLING);
// 高电平变为低电平触发 ,调用中断处理子函数RoteStateChanged()
pinMode(CLK, INPUT);
digitalWrite(2, HIGH); // 上拉电阻
pinMode(DAT, INPUT);
digitalWrite(3, HIGH); // 上拉电阻
pinMode(SW, INPUT);
digitalWrite(4, HIGH); // 上拉电阻
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
Serial.begin(9600); //设置波特率为9600
}
void loop()
{
if (!(digitalRead(SW))) //如果按下按钮
{
COUNT = 0; //计数清零
Serial.println(“STOP COUNT = 0”); //串口输出清零
digitalWrite(LED1, LOW); //LED1灯灭
digitalWrite(LED2, LOW); //LED2灯灭
delay (2000); //延时2秒
}
Serial.println(COUNT); //如果没有按钮,输出计数值
}
void RoteStateChanged() //当CLK下降沿触发的时候,进入中断
{
if (digitalRead(DAT)) // 当DAT为高电平时,是前进方向
{
COUNT++; //计数器累加
digitalWrite(LED1, HIGH); // LED1亮
digitalWrite(LED2, LOW); //LED2 灭
delay(20);
}
else // 当 DAT是低电平是反方向滚动
{
COUNT--; //计数器累减
digitalWrite(LED2, HIGH); // LED2亮
digitalWrite(LED1, LOW); // LED1灭
delay(20);
}
}
4.17.26. 26. 麦克风声音传感器#
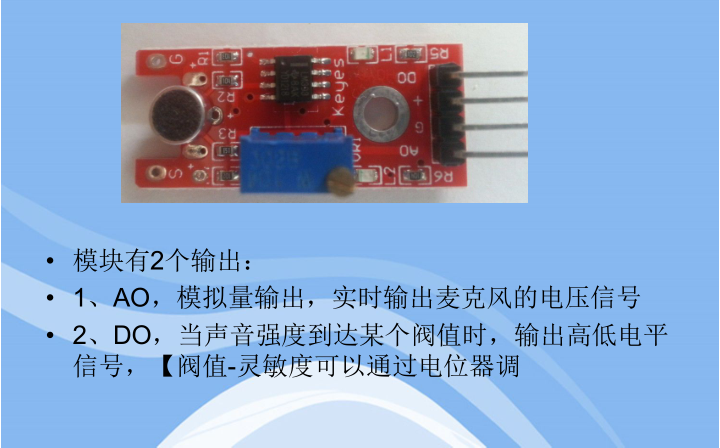
//数字输出
nt Led=13; //定义LED 接口
int buttonpin=3 //定义传感器D0接口
int val; //定义数字变量val
void setup()
{
pinMode(Led,OUTPUT); //定义LED 为输出接口
pinMode(buttonpin,INPUT); //定义传感器D0为输出接口
}
void loop()
{
val=digitalRead(buttonpin); //将数字接口3的值读取赋给val
if(val==HIGH) //当声音检测模块检测有信号时,LED 闪烁
{
digitalWrite(Led,HIGH)
}
else
{
digitalWrite(Led,LOW)
}
}
//模拟输出
int sensorPin = A5; // 选择模拟5输入端口
int ledPin = 13; // 选择LED显示端口
int sensorValue = 0; // 声音值变量
void setup()
{
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
}
void loop()
{
sensorValue = analogRead(sensorPin); //读声音传感器的值
digitalWrite(ledPin, HIGH); //灯闪烁
delay(50);
digitalWrite(ledPin, LOW); //灯闪烁
delay(50);
Serial.println(sensorValue, DEC); //以10进制的形式输出声音值
}
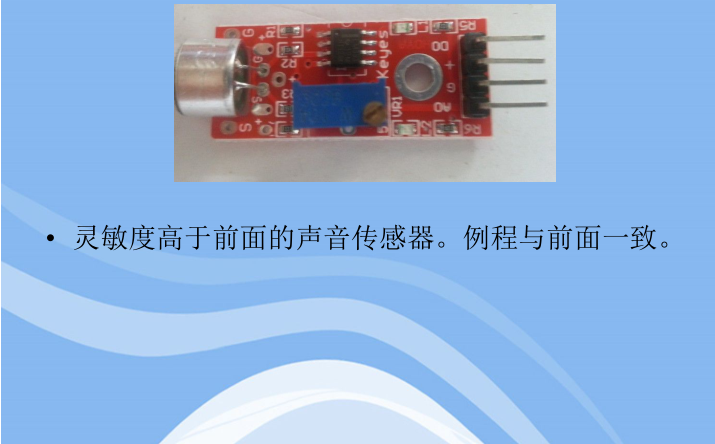
4.17.27. 27. 高感度声音传感器#
4.17.28. 28. 模拟式温度传感器#
#include <math.h>
double Thermister(int RawADC)
{
double Temp; Temp = log(((10240000/RawADC) - 10000));
Temp = 1 / (0.001129148 + (0.000234125 + (0.0000000876741 *
Temp * Temp ))* Temp );
Temp = Temp - 273.15;
// 转换温度值;
return temp;
}
void setup()
{
Serial.begin(9600);
}
void loop()
{
Serial.print(Thermister(analogRead(0))); // 输出转换好的温度值
Serial.println("c");
delay(500);
}
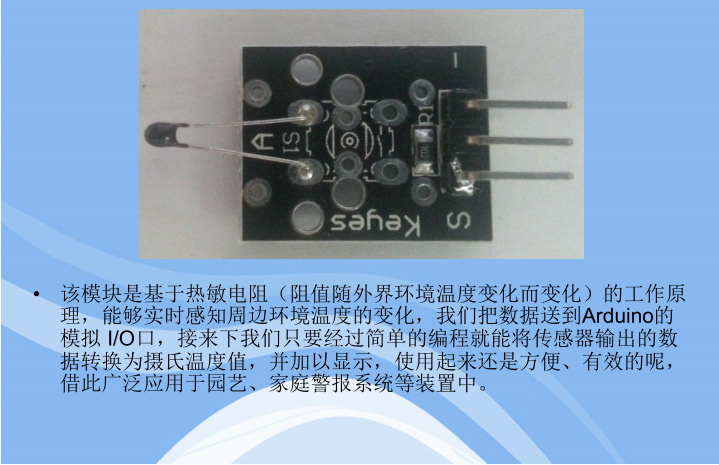
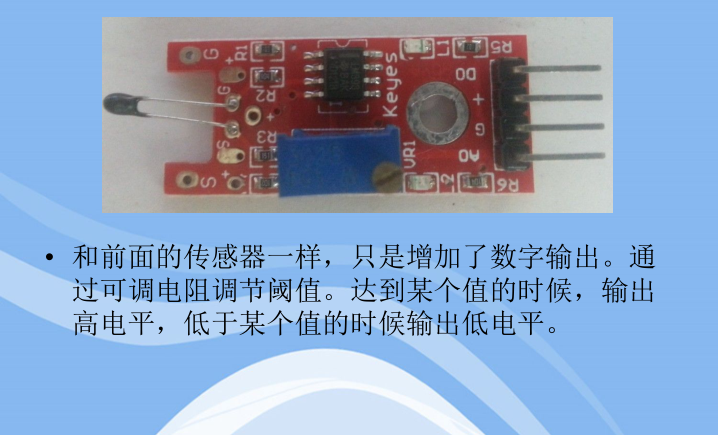
4.17.29. 29. 数字温度传感器#
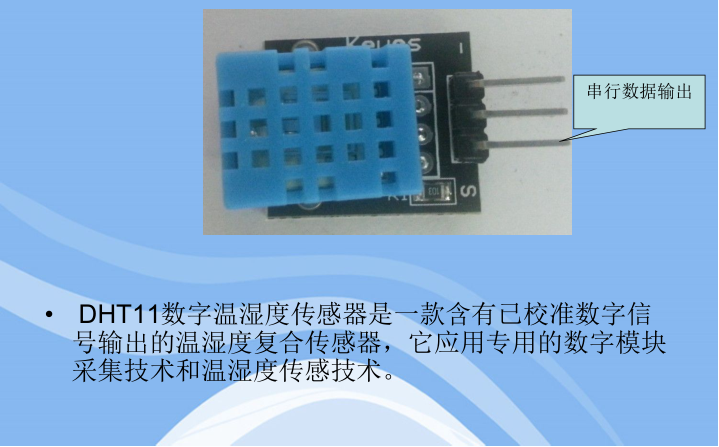
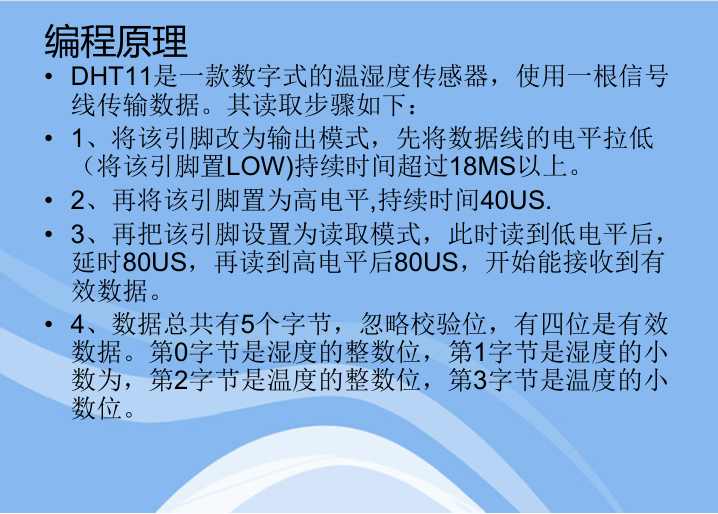
4.17.30. 30. 温湿度传感器#
int DHpin = 8; //数字第8引脚读取
byte dat[5]; //设置5个字节的数组
byte read_data()
{
byte data;
for(int i=0; i<8; i++)
{
if(digitalRead(DHpin) == LOW)
{
while(digitalRead(DHpin) == LOW); //等待50us;
delayMicroseconds(30); //判断高电平的持续时间,以判定数据是‘0’还是‘1’;
if(digitalRead(DHpin) == HIGH) data |= (1<<(7-i)); //高位在前,低位在后;
while(digitalRead(DHpin) == HIGH); //数据‘1’,等待下一位的接收;
}
return data;
}
}
void start_test()
{
digitalWrite(DHpin,LOW); //拉低总线,发开始信号;
delay(30); //延时要大于18ms,以便DHT11能检测到开始信号;
digitalWrite(DHpin,HIGH);
delayMicroseconds(40); //等待DHT11响应;
pinMode(DHpin,INPUT); //改为输入读取模式
while(digitalRead(DHpin) == HIGH);
delayMicroseconds(80); //DHT11发出响应,拉低总线80us;
if(digitalRead(DHpin) == LOW);
delayMicroseconds(80); //DHT11拉高总线80us后开始发送数据;
for(int i=0;i<4;i++) //接收温湿度数据,校验位不考虑;
dat[i] = read_data();
pinMode(DHpin,OUTPUT); //改为输出模式
digitalWrite(DHpin,HIGH);//发送完一次数据后释放总线,等待主机的下一次开始信号;
}
void setup()
{
Serial.begin(9600);
pinMode(DHpin,OUTPUT);
}
void loop()
{
start_test();
Serial.print("Current humdity = ");
Serial.print(dat[0], DEC); //显示湿度的整数位;
Serial.print('.');
Serial.print(dat[1],DEC); //显示湿度的小数位;
Serial.println('%');
Serial.print("Current temperature = ");
Serial.print(dat[2], DEC); //显示温度的整数位;
Serial.print('.');
Serial.print(dat[3],DEC); //显示温度的小数位;
Serial.println('C');
delay(700);
}
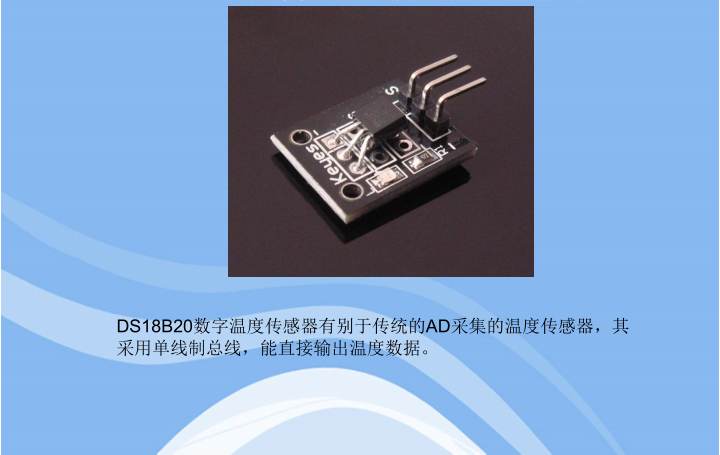
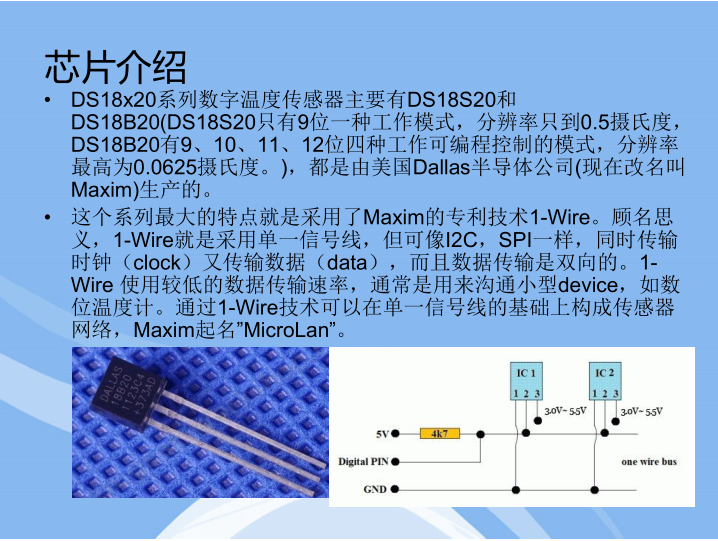
4.17.31. 31. DS18b20 数字温度传感器模块#
#include <OneWire.h>
#include <DallasTemperature.h>
#define ONE_WIRE_BUS 2 // 数据线接数据口2
OneWire oneWire(ONE_WIRE_BUS); //实例化一个对象
DallasTemperature sensors(&oneWire); //实例化一个对象
void setup(void)
{
Serial.begin(9600); //串口波特率9600
Serial.println("Dallas Temperature IC Control Library Demo");
sensors.begin(); //调用该对象的方法,启动传感器初始化
}
void loop(void)
{
Serial.print(“Requesting temperatures...”);
sensors.requestTemperatures(); // 发送命令去读取温度
Serial.println("DONE");
Serial.print(“Temperature for the device 1 (index 0) is: ”);
Serial.println(sensors.getTempCByIndex(0)); //显示索引号为0的传感器温度。(可在总线上接多个传感器,根据索引号地址来区分)
}
4.17.32. 32. 红外发射#
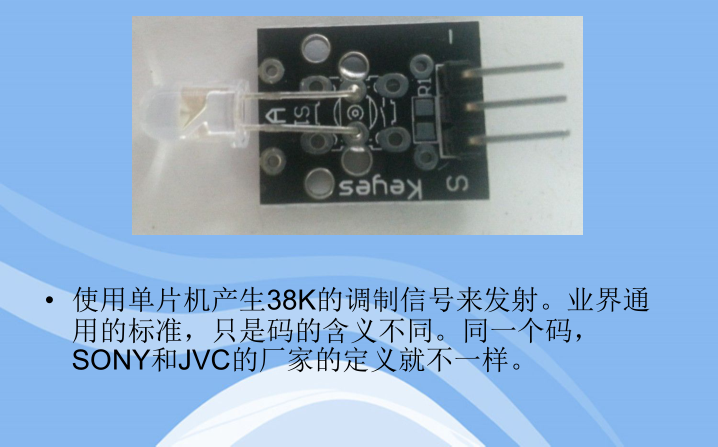
//将红外S端接数字第3脚(PWM)
#include <IRremote.h>
IRsend irsend; //实例化一个对象
void setup()
{
Serial.begin(9600);
}
void loop()
{
if (Serial.read() != -1)
{
for (int i = 0; i < 3; i++)
{
irsend.sendSony(0xa90, 12); // Sony TV power code
delay(40);
}
}
}
4.17.33. 33. 红外接收#

#include <IRremote.h>
int RECV_PIN = 11; //定义红外接收器的引脚为11
IRrecv irrecv(RECV_PIN); //实例化一个对象,并使用第11脚进行接收
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // 初始化红外接收器
}
void loop()
{
if (irrecv.decode(&results))
{
Serial.println(results.value, HEX); //以16进制换行输出接收代码
Serial.println(); //为了便于观看输出结果增加一个空行
irrecv.resume(); // 接收下一个值
}
}
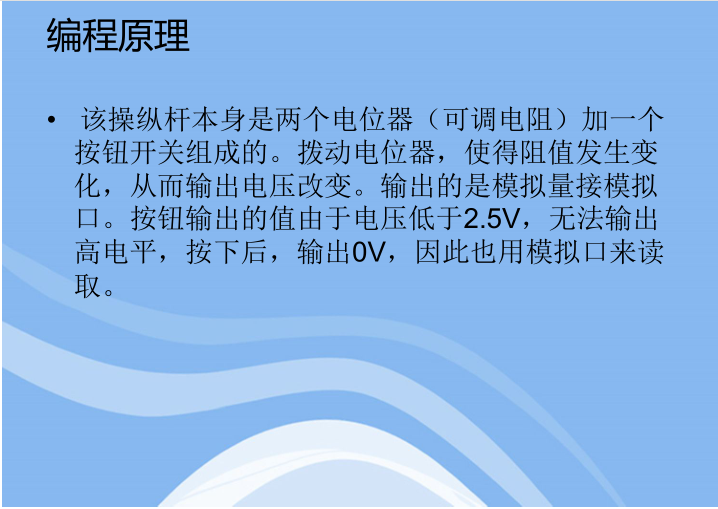
4.17.34. 34. Joystick PS2 摇杆#
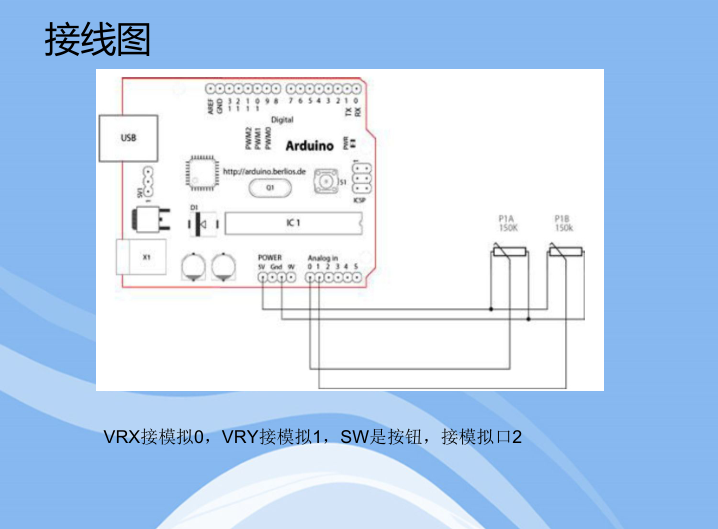
int Xaxis=A0; //定义X轴由模拟0端口读取
int Yaxis=A1; //定义Y轴由模拟1端口读取
int Zsw=A2; //定义Z按钮由模拟2端口读取(因为开关最大值低于2.5V)
int value = 0;//该变量读取模拟口的值
void setup()
{
Serial.begin(9600);
}
void loop()
{
value = analogRead(Xaxis); //读取模拟端口0
Serial.print("X:");
Serial.print(value, DEC);
value = analogRead(Yaxis); //读取模拟端口1
Serial.print(" | Y:");
Serial.print(value, DEC);
value = analogRead(Zsw); //读取模拟端口2
Serial.print(" | Z: ");
Serial.println(value, DEC);
delay(100);
}
4.17.35. 35. 继电器#

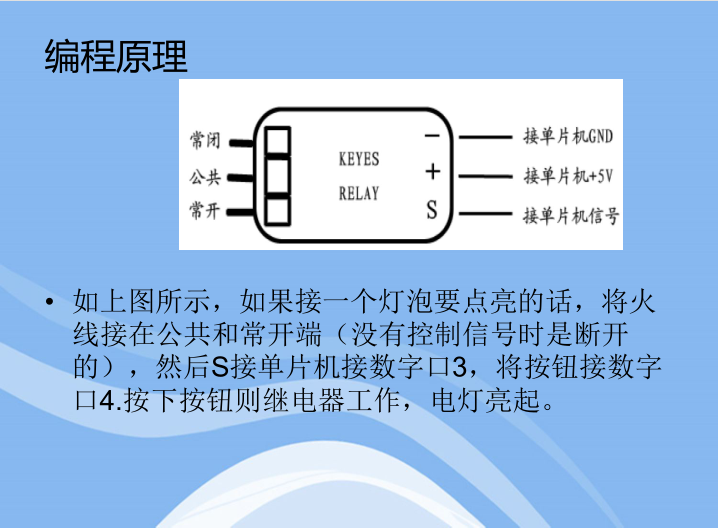
int relayPin=3;
int buttonPin=4;
void setup()
{
pinMode(relayPin,OUTPUT); //定义端口属性为输出;
pinMode(buttonPin,INPUT);//定义端口属性为输入;
}
void loop()
{
if(digitalRead(buttonPin)==HIGH)
digitalWrite(relay,HIGH); //继电器导通;
else
digitalWrite(relay,LOW); //继电器开关断开;
delay(1000);
}
4.17.36. 更多资源,请关注公众号!#
