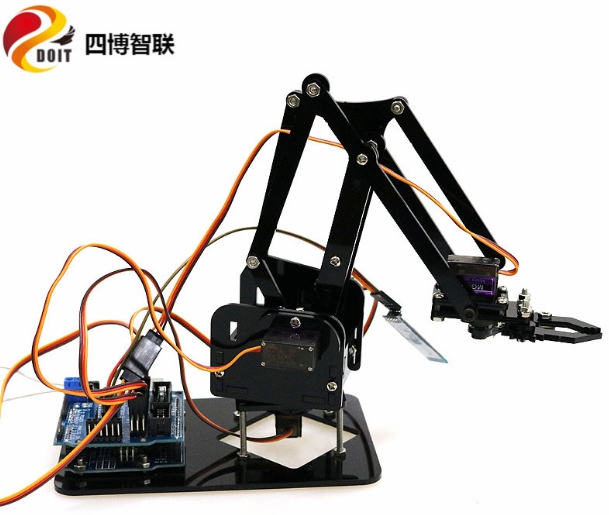
2.3.2. 亚克力机械臂的组装说明#
MeArm是时下最发烧的桌上型机器手臂,藉由 DIY 套件,它不只能带你走入 maker 世界, 更能培养程序设计能力, 从学生到社会人士都适合玩。本文件为 DIY 步骤,共 16 个步骤。
注意:180度舵机不同于普通电机,有固定的角度。所有舵机在出货前都已经是中位90度状态,在安装上机械臂之前,请勿随意转动舵机角度,否则会导致安装失败!(若不慎在安装前转动了舵机,请按角度需要将舵机复位。)
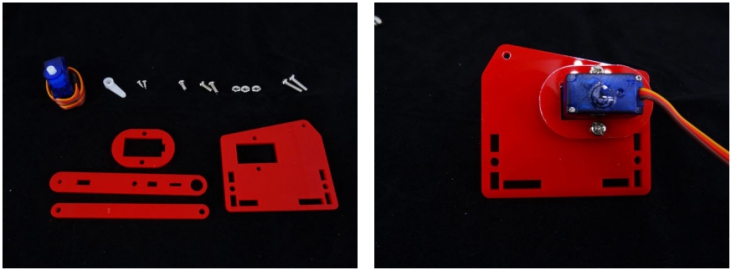
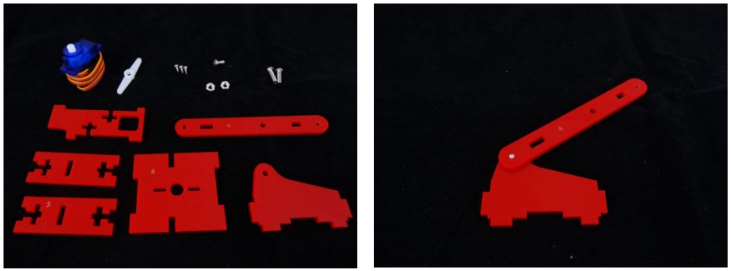
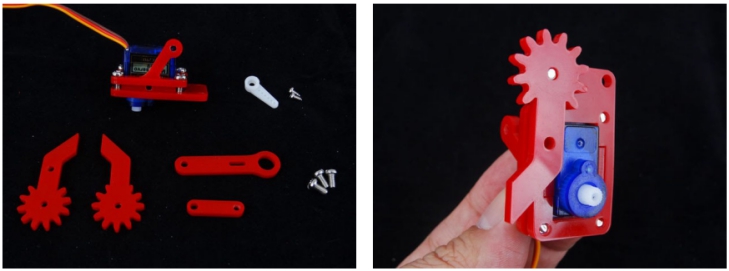
2.3.2.1. Step 1: 查看清单#
|
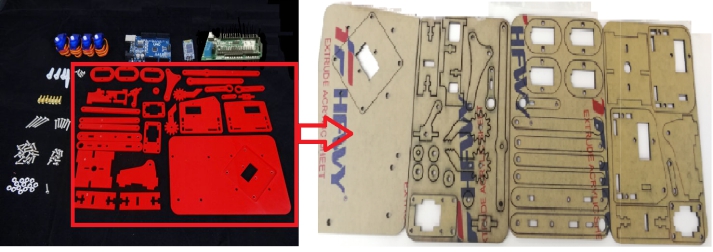
2.3.2.1.1. 清单列表:#
名称 |
PM330mm螺丝 |
PM310mm螺丝 |
PM38mm螺丝 |
PM36mm 螺丝 |
M3螺母 |
M39单通铜柱 |
MG90S |
|---|---|---|---|---|---|---|---|
数量 |
4 |
12 |
15 |
15 |
16 |
7 |
4 |
2.3.2.1.2. 控制套件:#
Arduino UNO R3 x1
4 Motor && 16 Servo Board x1
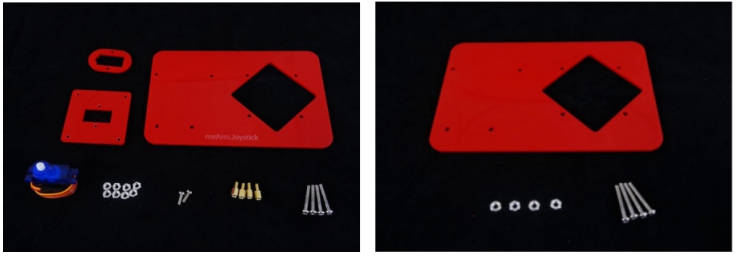
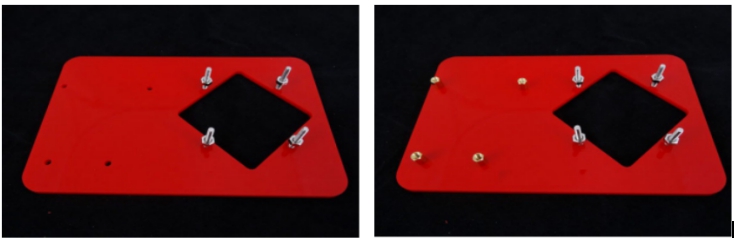
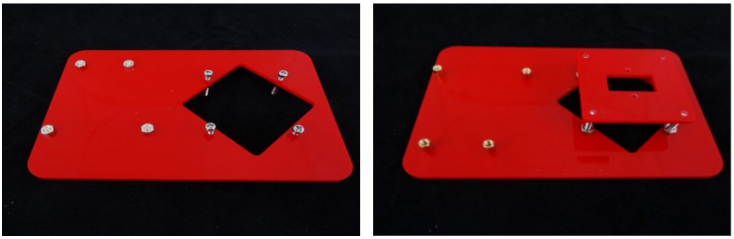
2.3.2.2. Step 2: 从下往上安装,首先安装底座#
按下图所示进行安装,使用到螺丝:
30 mm x 4
M3螺母 x 8
弹头铜柱x4
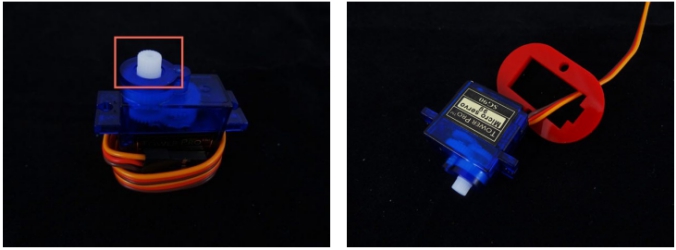
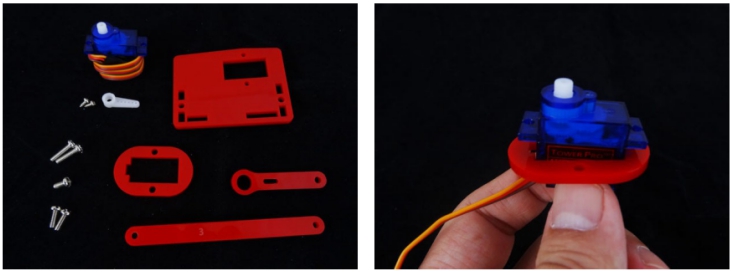
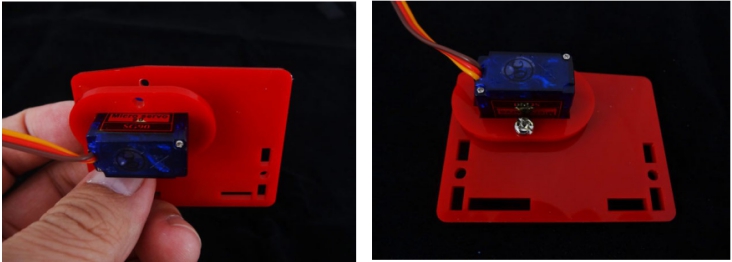
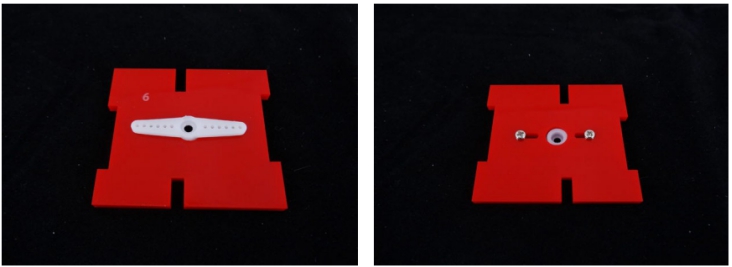
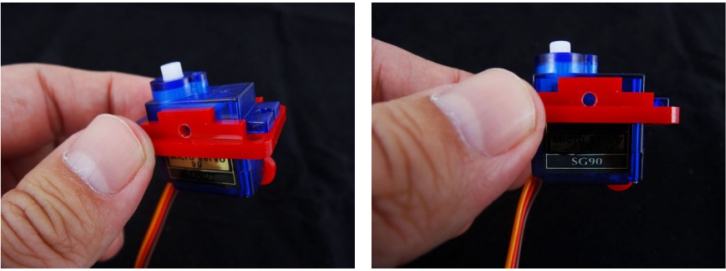
2.3.2.3. Step 3: 安装第一个舵机#
按下图方式安装,注意该舵机是180度的而不是360度的,所以不要转动它,使用到的螺丝
8mm x 2
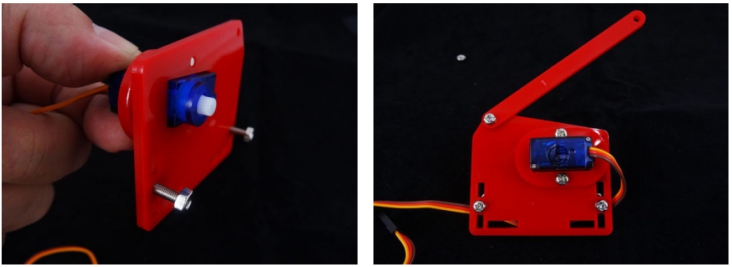
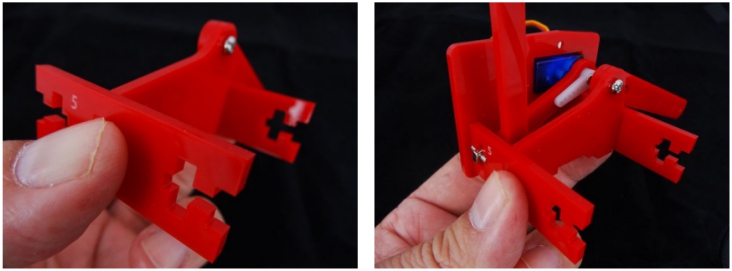
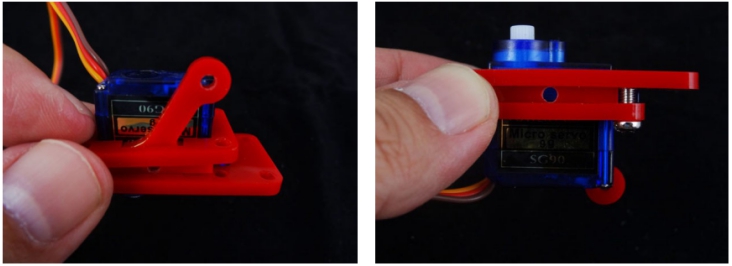
2.3.2.4. Step 4: 安装左臂#
请装上操纵杆,顺时针旋转伺服器直到停止。然后固定,具体如下图所示,使用到的螺丝:
12mm x 3
8mm x 2

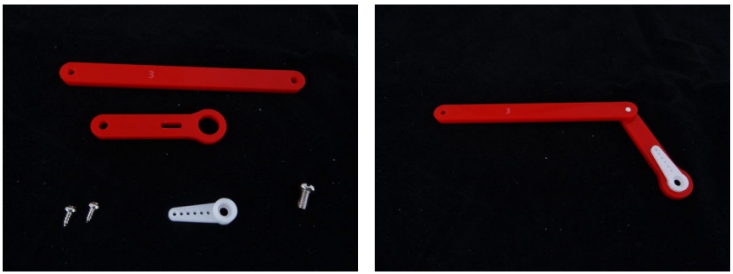
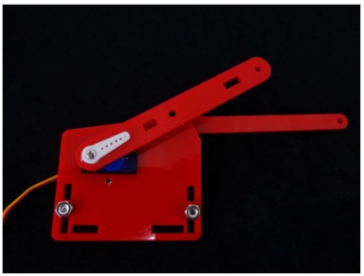
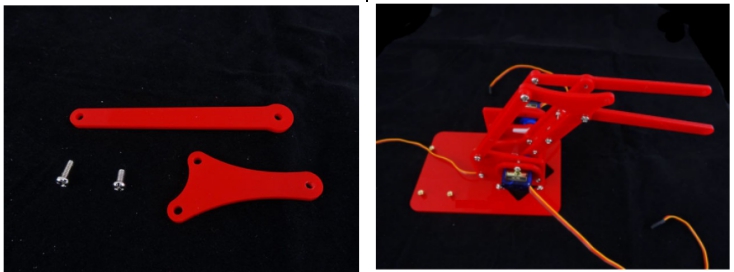
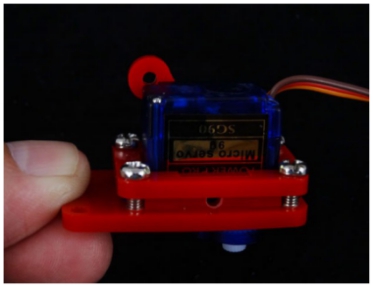
2.3.2.5. Step 5: 安装右臂#
按下图所示安装,使用到的螺丝:
10mm x 3
8mm x 2
6mm x 1
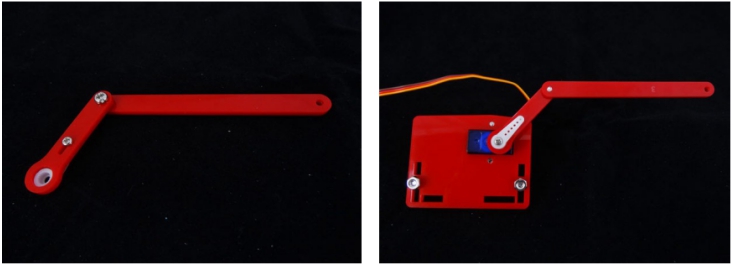
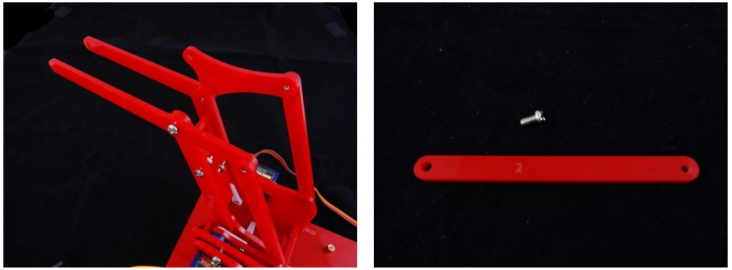
2.3.2.6. Step 6:安装左臂和底盘#
按下图所示方式进行安装,使用到的螺丝:
10mm x 2
6mm x 1
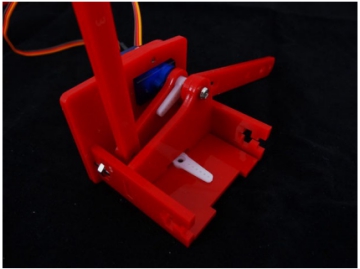
2.3.2.7. Step 7: 安装右臂和底盘#
2.3.2.8. Step 8: 安装中间移动杆#
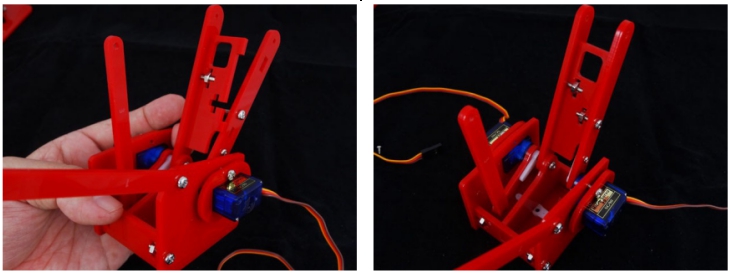
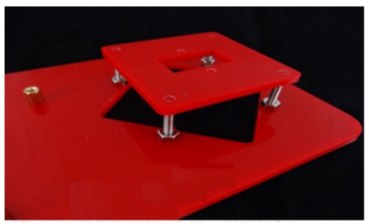
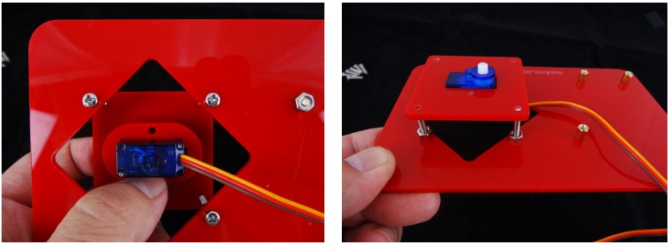
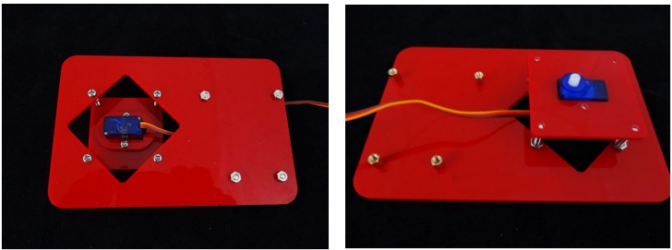
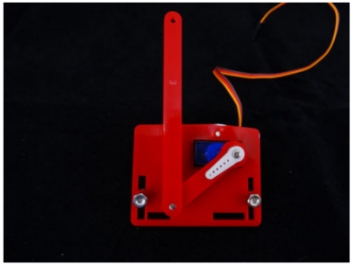
2.3.2.9. Step 9: 安装底盘和机箱#
请将机箱固定在底座上,顺时针旋转伺服器直到停止。然后固定在基座上的舵机上,使用到的螺丝:
舵机自带的固定螺丝
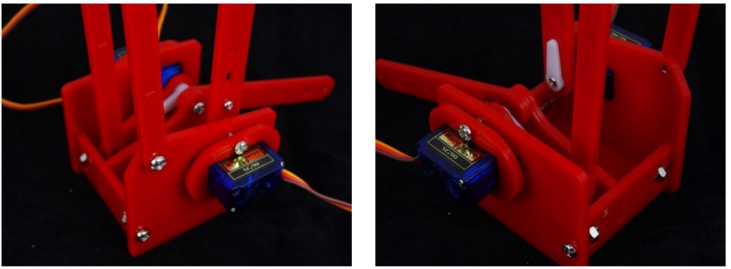
2.3.2.10. Step 10: Branch 1#
按下图所示方式进行安装,使用到的螺丝:
6mm x 2
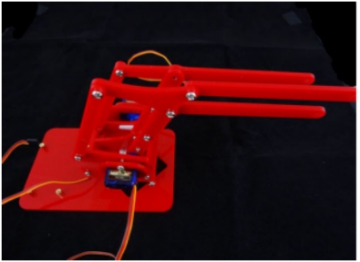
2.3.2.11. Step 11: Branch 2#
按下图所示方式进行安装,使用到的螺丝:
8mm x 1
6mm x 2
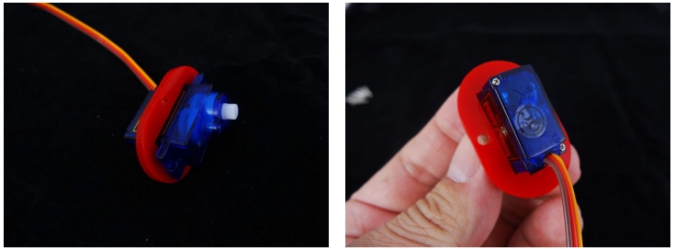
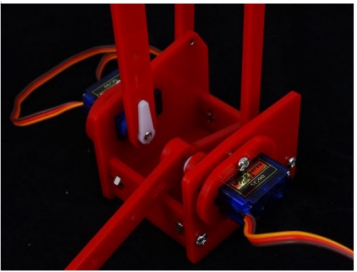
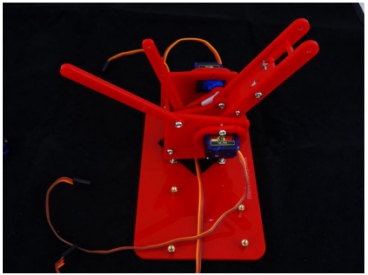
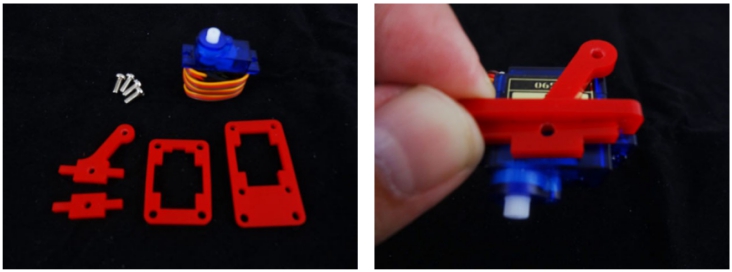
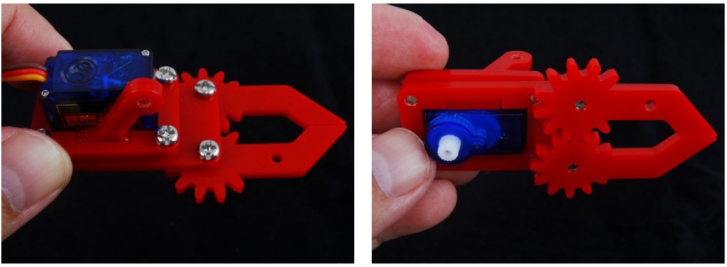
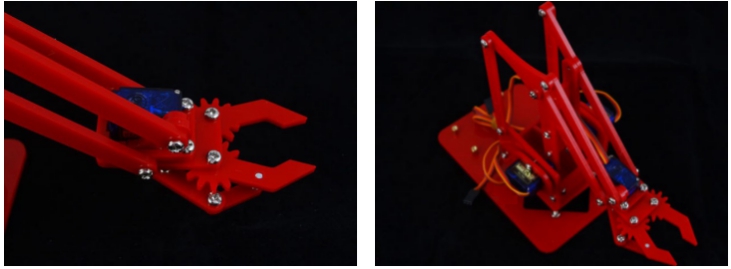
2.3.2.12. Step 12: 爪子舵机#
按下图所示放下进行安装,使用到的螺丝:
8mm x 4
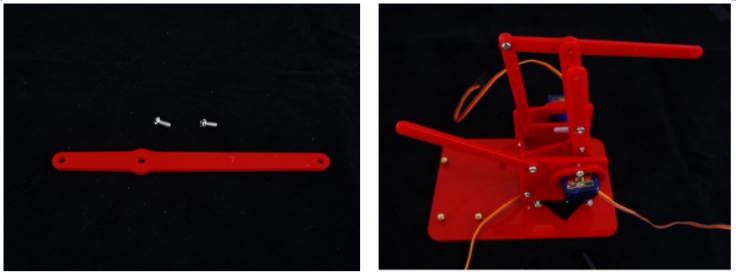
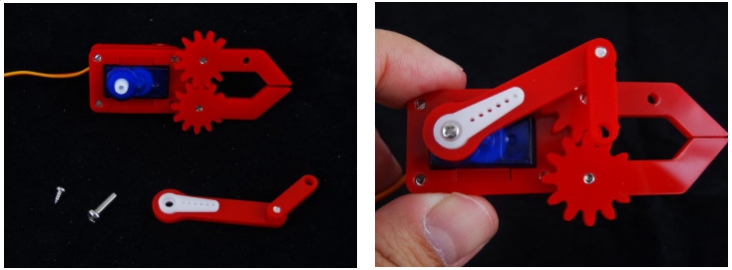
2.3.2.13. Step 13: Gripper 1#
按下图所示安装,使用到的螺丝:
8mm x 1
6mm x 3
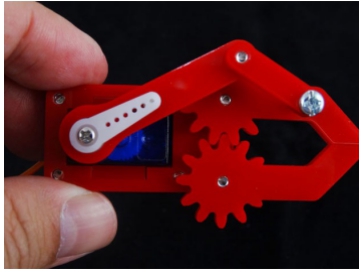
2.3.2.14. Step 14: Gripper 2#
顺时针旋转伺服,直到停止,并固定为最后一秒的数字。逆时针稍微大一点旋转,以连接棒和夹具。使用到的螺丝:
10mm x1
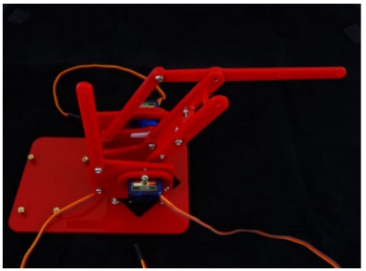
2.3.2.15. Step 15: 安装爪子#
按下图所示安装,使用到的螺丝:
8mm x2
6mm x1
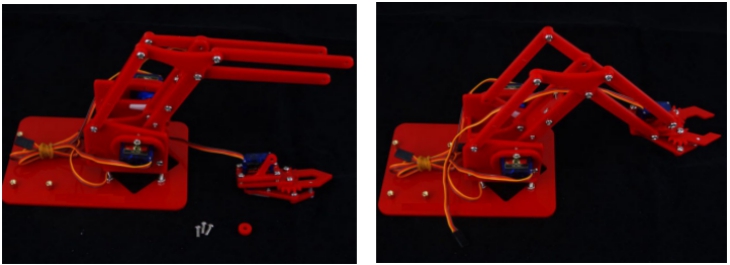
2.3.2.16. Step 16: 添加控制板#
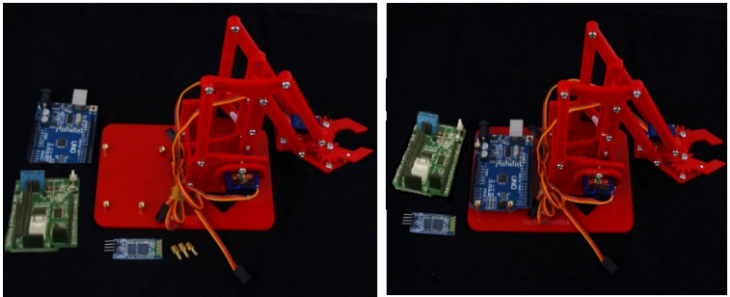
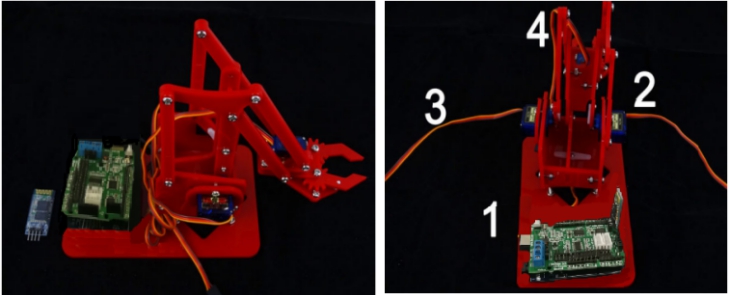
到此安装完成
2.3.2.17. 更多资源,请关注公众号!#
