Abstract
This manual is for 9v DC motor
3.1. 9V 带码盘电机#
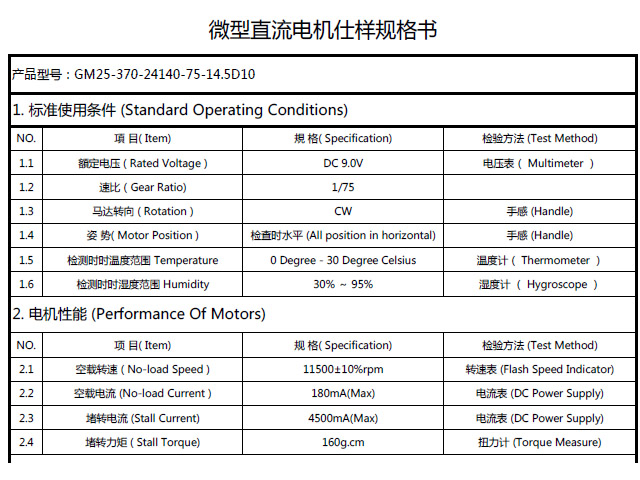
3.1.1. 1. 9V 25GA-370 Motor Parameters:#
Name: 25mm DC carbon brush motor (with Hall sensor code disc)
Output rate: 150 ± 10% rpm
Load current: 200mA (Max)
Stall current: 4500mA (max)
Locking torque: 9.5kgNaN
Load speed: 100 ± 10% rpm
Load torque: 3000gNaN
Load current: 1200mA (Max)
Load noise: 56dB
Working voltage: 9V
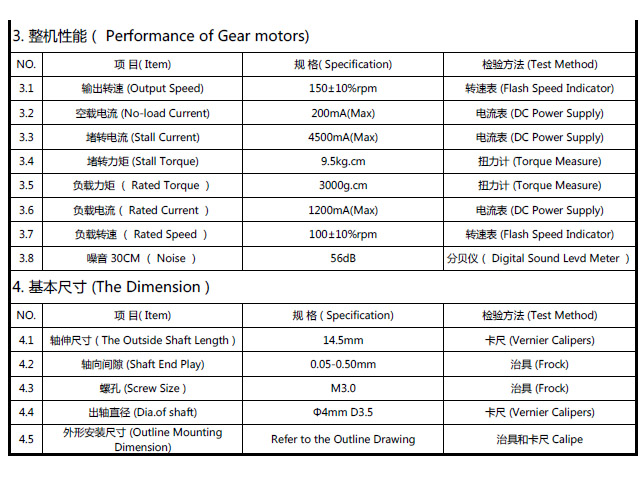
Shaft extension size: 14.5mm
Axial clearance: 0.05-0.50mm
Screw size: M3.0
Shaft diameter: phi4mm, D3.5
Code wheel parameters: 2 pulses / turn
Sensor working voltage: 3-5V
3.2. 2. Motor Connection#
备注,多年前,电机的后盖已经取消,由于种种原因,后面不配了。
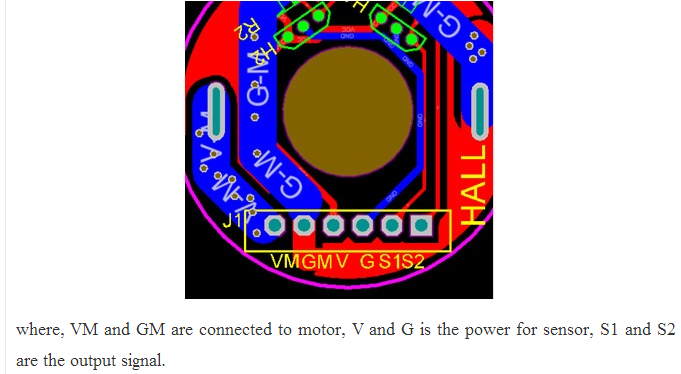
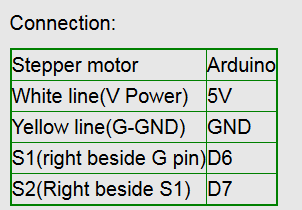
The connection is show in the following picture.

Hall sensor:
This motor has Hall sensor, which can measure the velocity, and give out a feedback. If let the interface (or plug) face to our face, from left to right, the interface meanings are VM (power for motor), GM (grand for motor), V (power for Hall sensor), G (grand for Hall sensor), S1 (the output signal for the 1st Hall sensor), S2 (the output signal for the 2nd Hall sensor)
3.3. How to Test the Motor#
There are two methods.
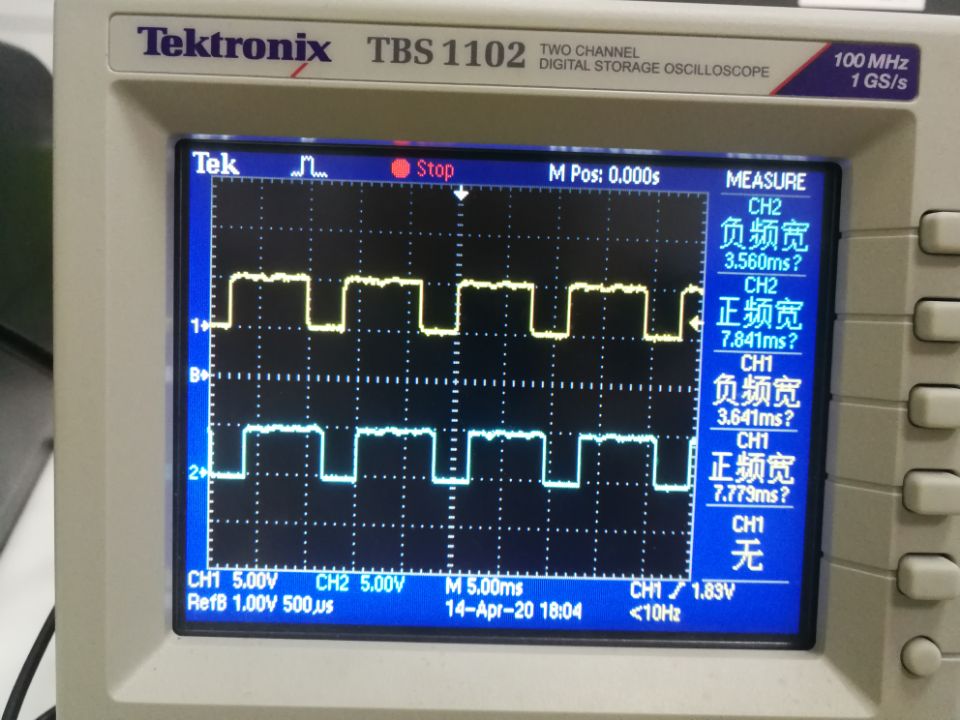
3.3.1. 3.1 Use Oscilloscope#
When power on the motor, and connect to the Hall sensor of motor, you will see the following wave. This way is very simple.
3.3.2. 3.2 Use Arduino#
3.3.2.1. 3.2.1 Connect to UNO#
3.3.2.2. 3.2.2 Test Code#
/*
* How to test encoder with Arduino
* url: http://osoyoo.com/?p=30267
*/
#define outputA 6
#define outputB 7
int counter = 0;
int aState;
int aLastState;
void setup() {
pinMode (outputA,INPUT);
pinMode (outputB,INPUT);
Serial.begin (9600);
// Reads the initial state of the outputA
aLastState = digitalRead(outputA);
}
void loop() {
aState = digitalRead(outputA); // Reads the "current" state of the outputA
// If the previous and the current state of the outputA are different, that means a Pulse has occured
if (aState != aLastState){
// If the outputB state is different to the outputA state, that means the encoder is rotating clockwise
if (digitalRead(outputB) != aState) {
counter ++;
} else {
counter --;
}
Serial.print("Position: ");
Serial.println(counter);
}
aLastState = aState; // Updates the previous state of the outputA with the current state
}
From the monitor, you can see the output data.
Very important, when you install the motor to the car chassis, Please choose the M3*6 screw to fix the motor. By our experience, if you choose the screw is too long, the motor would be stalled, and cannot be run.
